VA Motion Controller Programming Manual
563
Figure above, the circle center, I = X1, J = Y1 + Param_J, K = Z1 +
Param_K
End point coordinates X = Pos_Dis_X, Y = Pos_Dis_Y, Z = Pos_Dis_Z.
CirMode = 0,
Param_R = R, R ≠ 0
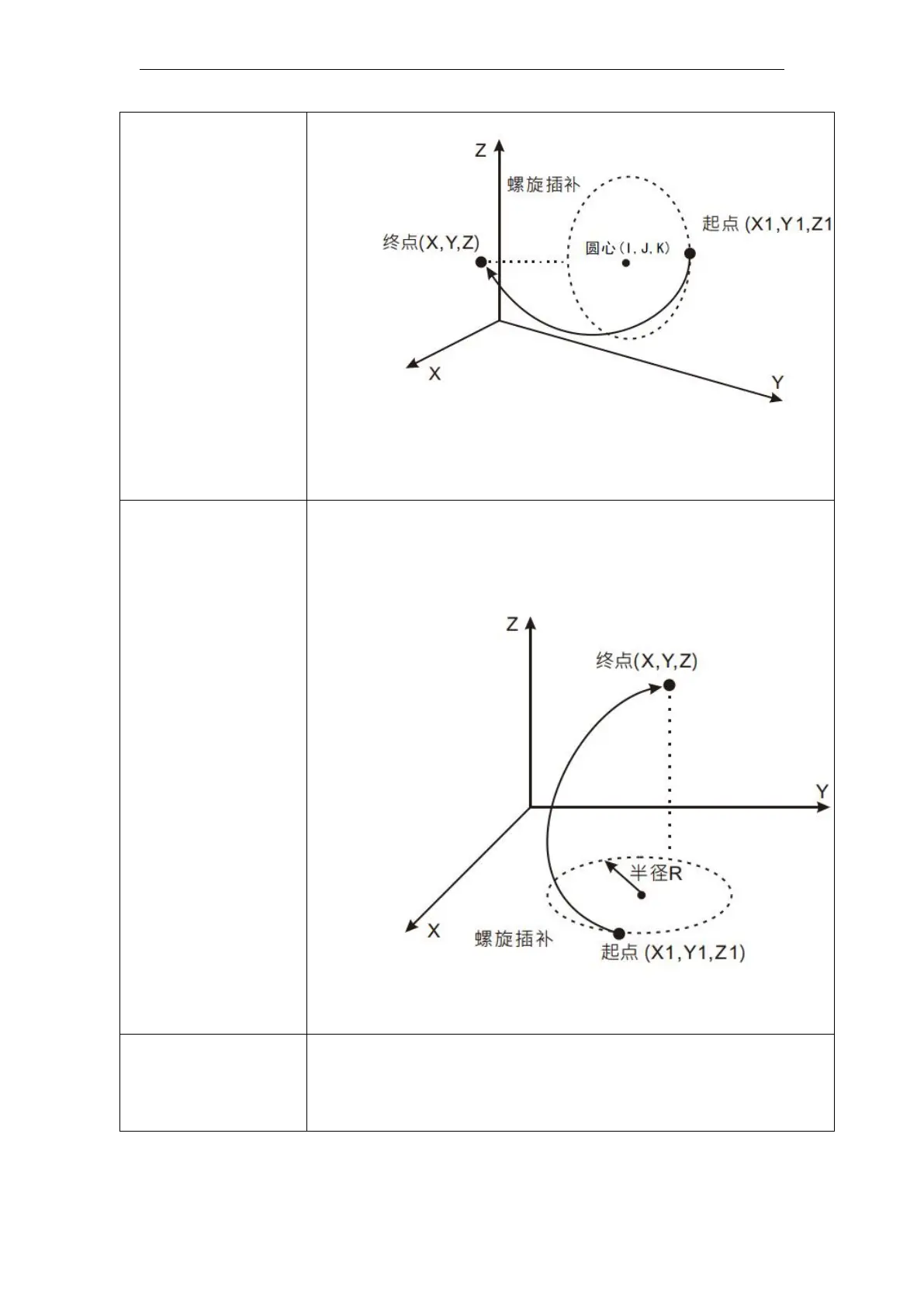
XY plane circle radius method. When using this method, the value
represents the radius of the circle Param_R on the XY plane, then Param_R
greater than 0, the minor arc of the circular arc; Param_R less than 0,
preferably circular arc-arc
The radii of the above figure R.
End point coordinates X = Pos_Dis_X, Y = Pos_Dis_Y, Z = Pos_Dis_Z.
CirMode = 1,
Param_R = R, R ≠ 0
ZX plane circle radius method. When using this method, the value
represents the radius of the circle Param_R ZX plane, this time Param_R
greater than 0, the minor arc of the circular arc; Param_R less than 0,
preferably circular arc-arc