Name Corresponding stopping mode
ddCoasting_
ISD51x
Coasting and stay in state Operation.enabled
ddRamp_
ISD51x
Slow down on specied ramp and stay in state
Operation enabled. The deceleration value must be
specied for this mode.
ddCurren-
tLimit_
ISD51x
Slow down on current limit and stay in state
Operation enabled.
Table 6.60 Enumeration DD_STOPPING_MODE_ISD51x
6.5.6.7 DD_NodeNotication_ISD51x
This function block is used for advanced and basic CAMs. It
enables/disables the sending of a notication when a
certain node within the CAM is passed. Also, information
about the following segment of this node is transmitted.
The information can be read using function block
DD_ReadCamInfo_ISD51x (see
chapter 6.5.6.9 DD_ReadCamInfo_ISD51x).
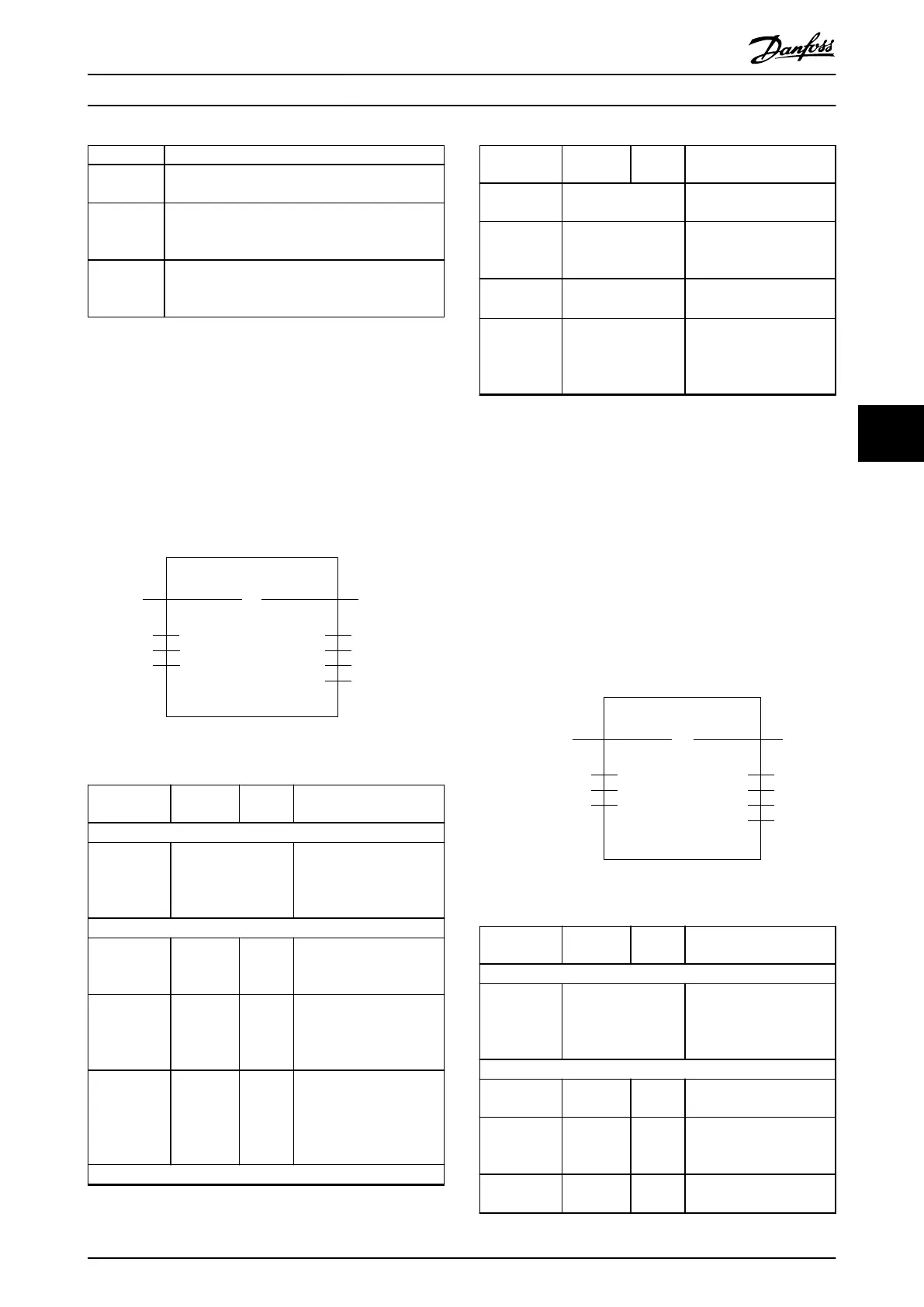
DD_NodeNotication_ISD51x
Axis
ExecuteBOOL
AXIS_REF_-
ISD51x
BOOLDone
BOOLBusy
BOOL
DD_ERROR_ISD51x
ErrorInfo
Error
NodeIDUINT
SendNote
BOOL
Illustration 6.78 DD_NodeNotication_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Sends the command to
enable/disable the node
notication.
NodeID UINT 0 ID of the node that
should/should not send a
notication when it is
passed.
SendNote BOOL FALSE FALSE: No notication is
sent.
TRUE: Notication is sent
together with information
of the following segment.
VAR_OUTPUT
Variable
name
Data type Default
value
Description
Done BOOL The command has been
sent.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.61 DD_NodeNotication_ISD51x
6.5.6.8 DD_GoToSetpoint_ISD51x
This function block is used for advanced and basic CAMs. It
commands a movement to the setpoint of the CAM while
the guide value velocity is 0. This is used, for example,
when starting up a CAM and the axis position is not on
the CAM prole.
The required movement is then calculated by the axis
itself, based on the direction option code (see Table 6.42
for available values) over the specied time. The guide
value velocity must stay at 0 until this movement is
nished.
DD_GoToSetpoint_ISD51x
Axis
ExecuteBOOL
AXIS_REF_ISD51x
BOOLDone
BOOLBusy
BOOL
DD_ERROR-
_ISD51x
ErrorInfo
Error
DirectionMC_DIRECTION_ISD51x
Duration
UINT
130BE961.10
Illustration 6.79 DD_GoToSetpoint_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Starts the motion at rising
edge.
Direction MC_DIRECT
ION_ISD51
x
mcShor-
testWay
_ISD51x
Direction of motion.
See Table 6.42.
Duration UINT 0 Duration of this
movement [ms].
Programming Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 217
6
6

 Loading...
Loading...







