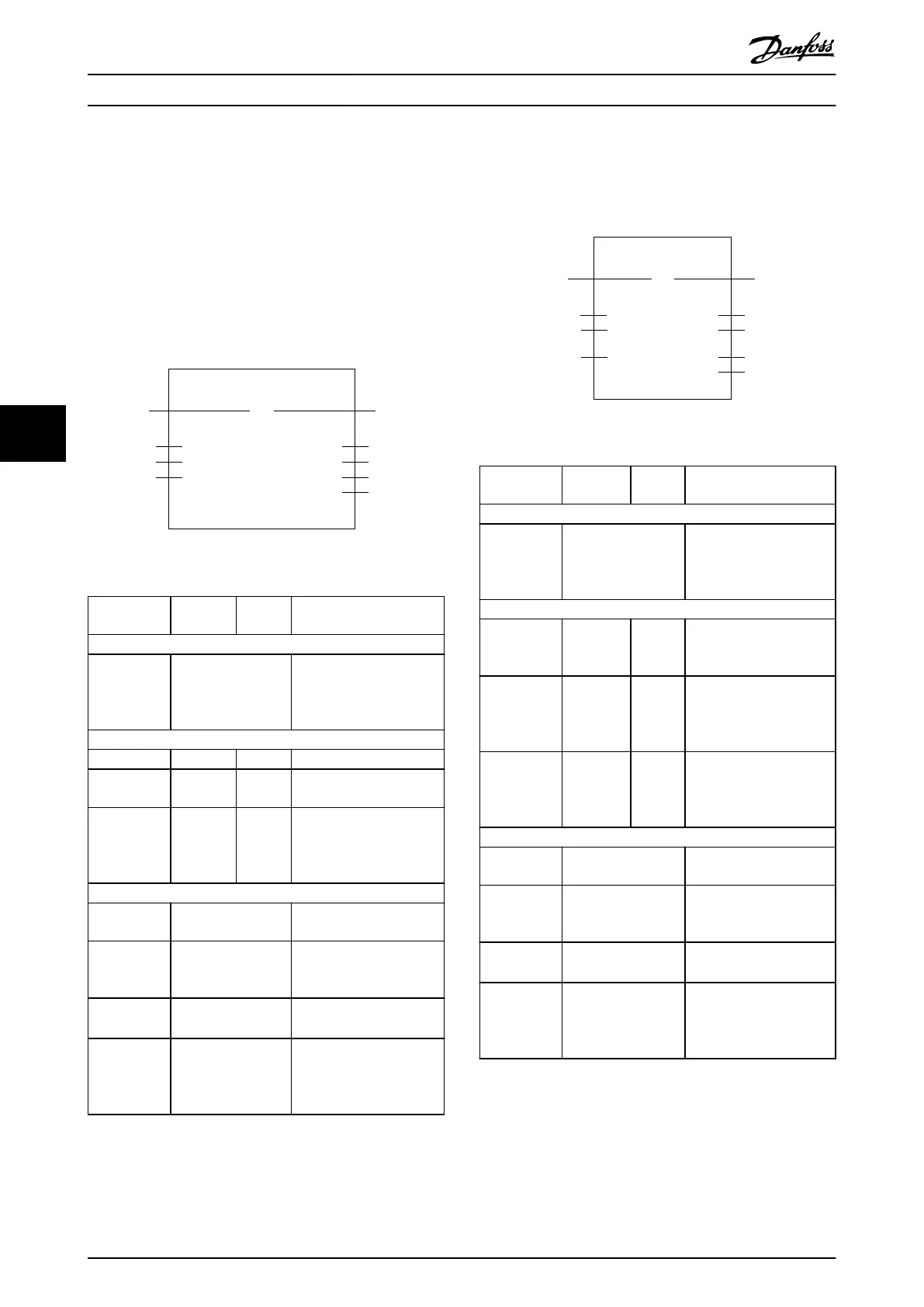
6.5.6.5 DD_SetSegmentParameter_ISD51x
This function block is used for advanced CAMs only. It
sends the angle value to the segment with the given
SegmentID and is used with MoveDistanceSegments and
FlyingStopSegments (see chapter 5.7.7.7 Editing Advanced
CAM Proles for further information). It must be sent before
the specied segment is active. Sending it when the
specied segment is active leads to an error (use
DD_ReadCAMinfo to read the error). The timing is not
checked inside the function block.
DD_SetSegmentParameter_ISD51x
Axis
ExecuteBOOL
AXIS_REF_-
ISD51x
BOOLDone
BOOLBusy
BOOL
DD_ERROR_-
ISD51x
ErrorInfo
Error
SegmentIDUINT
Angle
REAL
130BE958.10
Illustration 6.76 DD_SetSegmentParameter_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Sends the angle value.
SegmentID UINT 0 ID of the segment that
should use this parameter.
Angle REAL 0 Angle parameter to be
used by the given
segment. Angle must be
given in (slave) revolutions.
VAR_OUTPUT
Done BOOL The parameter has been
set.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.58 DD_SetSegmentParameter_ISD51x
6.5.6.6 DD_RotationStop_ISD51x
This function block is used for basic and advanced CAMs. It
stops the execution of the CAM for 1 master cycle.
DD_RotationStop_ISD51x
Axis
ExecuteBOOL
AXIS_REF_ISD51x
BOOLDone
BOOLBusy
BOOL
DD_ERROR_ISD51x
ErrorInfo
Error
StopModeDD_STOPPING_-
MODE_ISD51x
Deceleration
REAL
Illustration 6.77 DD_RotationStop_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Stops the processing of
the CAM for this master
cycle.
StopMode DD_STOPPI
NG_MODE
_ISD51x
ddCoasti
ng_ISD5
1x
Species the way of
stopping the servo drive
for this master cycle.
See Table 6.60.
Deceleration REAL 0 Deceleration value used
for the ramping
procedure. Only positive
values are allowed [rps/s].
VAR_OUTPUT
Done BOOL The command has been
sent.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.59 DD_RotationStop_ISD51x
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
216 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







