A-9
A-1List of Parameters
APPENDIX
- SV Series User’s Manual -
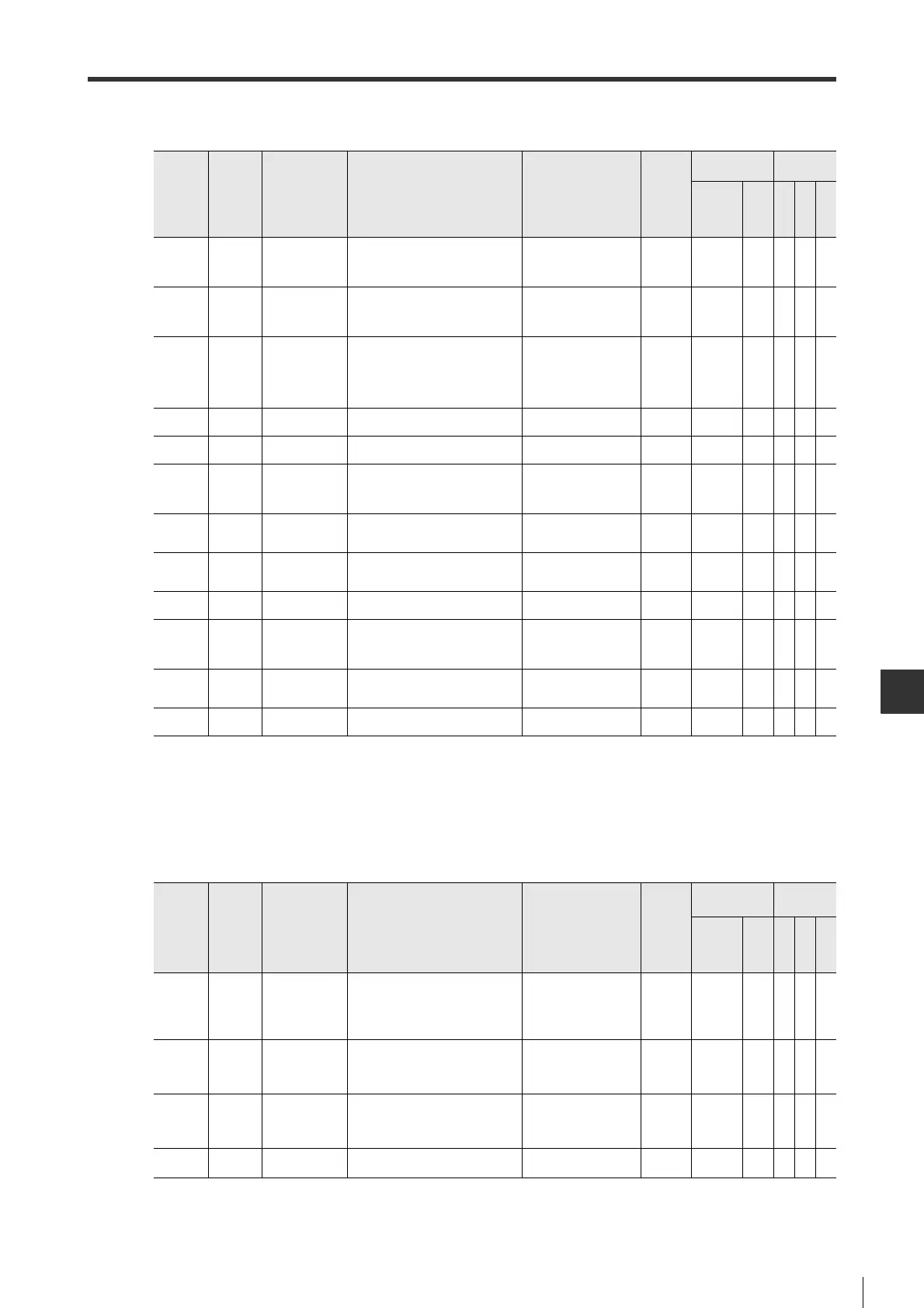
■Alarm-related parameters
■Other parameters
Parameter
Categor
y
Parameter
name
*1
Description
Set value/Setting
unit
Default
value
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
ALM_01
Extend
*
Servo OFF or
G1 alarm stop
mode
To set up stop mode when servo is
OFF and G1 alarm occurs as well
as the status after stop.
0: Dynamic brake
1: Dynamic brake and
free
2: Free
0
○
(001.0)
○○○○
ALM_02
Extend
*G2 alarm
stop mode
To set up stop mode when G2
alarm occurs.
The status after stop depends on
"*Servo OFF or G1 alarm stop mode".
0: Stop by command
speed 0
1: Same setting as
Servo OFF
0
○
(00B.1)
○○○
-
ALM_03
Extend
*Limit switch
stop mode
*3
To set up the stop mode at limit
switch ON.
0: Same setting as
Servo OFF
1: Stop by cmd spd 0
and servo lock
2: Stop by cmd spd 0
and free
1
○
(001.1)
○○○
-
ALM_04
Extend
Torque limit at
limit switch ON
To set up the torque at zero stop
after limit switch ON.
0 to 800(%) 800
○
(406)
○○○
-
ALM_05
Extend
*Low battery
voltage
To set up low battery voltage
alarming/warning
0: Alarm
1: Warning
0
○
(008.0)
○○○○
ALM_06
Extend
Deviation
excessive
warning level
To set up the set value to detect
"position deviation excessive
warning (900)" via ratio relative to
"deviation excessive alarm level".
10 to 100(%) 100
○
(51E)
○○
--
ALM_07
Extend
Deviation
excessive alarm
level
"Position deviation excessive alarm
(D00)" occurs when the absolute value
of position deviation exceeds set value.
1 to 1073741823
(CMD_PLS)
5242880
○
(520)
2 words
○○
--
ALM_08
Extend
Overload
warning
To set up the ratio of the time
detecting overload warning to the
time detecting overload alarm.
1 to 100(%) 20
○
(52B)
○○○○
ALM_09 Special
*Warning
detection
To set up whether warning is
detected or not.
0: Detect
1: Not detect
0 (008.2)
○○○○
ALM_10 Special
Dev excessive
alm level at
SVON
For servo ON, "excessive position
deviation at servo ON 1 (D01)"
alarm occurs when position
deviation exceeds set value.
1 to 1073741823
(CMD_PLS)
5242880
○
(526)
2 words
○○
--
ALM_11 Special
Dev excessive
warn level at
SVON
To set up the ratio relative to the
set value detected deviation
excessive alarm at servo ON.
10 to 100(%) 100
○
(528)
○○
--
ALM_12 Special
Speed limit at
SVON
For servo ON, speed is limited with the
set value when position deviation exists.
0 to 10000(min
-1
) 10000
○
(529)
○○
--
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
*3 Please set to "Stop by cmd spd 0 and servo lock" when used together with KV-ML16V. Otherwise, the unit
cannot work properly.
Parameter
Categor
y
Parameter
name
*1
Description
Set value/Setting
unit
Default
value
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
OTH_01
Extend
Brake cmd -
SVOFF delay
time
To set up the time for motor
changing into power OFF status
after outputting electromagnetic
brake command (brake operation)
at servo motor stop.
0 to 50(x10ms) 0
○
(506)
○○○○
OTH_02
Extend
Brake cmd
output speed
level
To set up output speed of
electromagnetic brake command
when servo is OFF during servo
motor rotation.
0 to 10000(min
-1
) 100
○
(507)
○○○○
OTH_03
Extend
Waiting time for
brake signal
To set up output delay time of
electromagnetic brake command
when servo is OFF during servo
motor rotation.
10 to 100(x10ms) 50
○
(508)
○○○○
OTH_04
Extend
JOG operation
speed
To set up speed of servo JOG
operation.
0 to 10000(min
-1
) 500
○
(304)
○○○○
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
 Loading...
Loading...