A-14
APPENDIX
A-1List of Parameters
- SV Series User’s Manual -
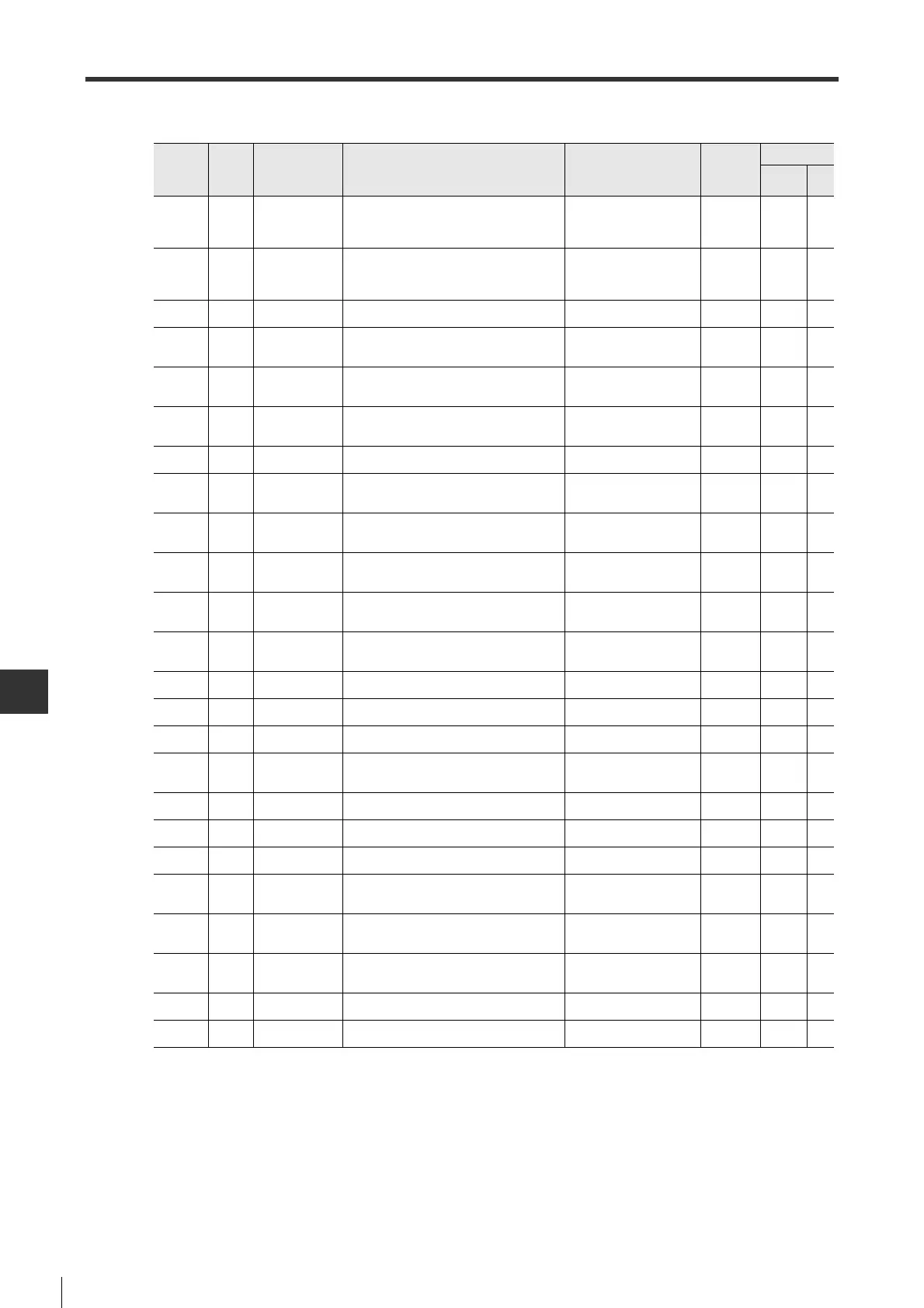
■Parameters relative to MECHATROLINK-II
Parameter
Catego
ry
Parameter
name
*1
Description Set value/Setting unit
Default
value
Enable type
*2
ML-II
PLS
ML_01 Special Software limit
*3
To set up whether software limit function is
used or not.
0: Enable
1:
P-Software limit invalid
2:
N-Software limit invalid
3: Disable
3
○
(801.0)
-
ML_02 Special
Software limit
check
To set up whether software limit check is
executed or not when target position
command is input via POSING and
INTERPOLATE.
0: Disable
1: Enable
0
○
(801.2)
-
ML_03 Special Origin range To set up origin coordinate range. 0 to 250 (CMD_PLS) 10
○
(803)
-
ML_04 Special P-Software limit To set up P-software limit coordinates.
-
2
30
+1 to 2
30
-
1
(CMD_PLS)
1073741823
○
(804)
2 words
-
ML_05 Special N-Software limit To set up N-software limit coordinates.
-2
30
+1 to 2
30
-1
(CMD_PLS)
-
1073741823
○
(806)
2 words
-
ML_06 Special
Absolute
encoder
origin offset
To set up the offset of encoder position and
feedback position (APOS) when ABS encoder is
used.
-
2
30
+1 to 2
30
-
1
(CMD_PLS
)
0
○
(808)
2 words
-
ML_07 Special
1st acceleration
rate 1
*4
To set up the 1st acceleration rate 1 of POSING,
EX_POSING, FEED, ZRET and HOLD command.
1 to 65535
(x10000CMD_PLS/s
2
)
100
○
(80A)
-
ML_08 Special
2nd acceleration
rate 1
*4
To set up the 2nd acceleration rate 1 of
POSING, EX_POSING, FEED, ZRET and
HOLD command.
1 to 65535
(x10000CMD_PLS/s
2
)
100
○
(80B)
-
ML_09 Special
Acceleration rate
change speed
1
*4
To set up the switching speed of 1st
acceleration rate 1 and 2nd acceleration rate
1.
0 to 65535
(x
100CMD_PLS/s)
0
○
(80C)
-
ML_10 Special
1st deceleration
rate 1
*4
To set up the 1st deceleration rate 1 of
POSING, EX_POSING, FEED, ZRET and
HOLD command.
1 to 65535
(x10000CMD_PLS/s
2
)
100
○
(80D)
-
ML_11 Special
2nd deceleration
rate 2
*4
To set up the 2nd deceleration rate 1 of
POSING, EX_POSING, FEED, ZRET and
HOLD command.
1 to 65535
(x10000CMD_PLS/s
2
)
100
○
(80E)
-
ML_12 Special
Deceleration rate
switch speed 1
*4
To set up the switching speed of 1st
deceleration rate 1 and 2nd deceleration rate
1.
0 to 65535
(x
100CMD_PLS/s)
0
○
(80F)
-
ML_13 Special
Acceleration/
deceleration bias
To set up the bias speed of acceleration/
deceleration filter of exponential function.
0 to 65535
(x
100CMD_PLS/s)
0
○
(810)
-
ML_14 Special
Accel/decel time
constant
To set up the time constant of acceleration/
deceleration filter of exponential function.
0 to 5100
(x
0.1ms) 0
○
(811)
-
ML_15 Special
Movement
average time
To set up the movement average time of
movement average filter.
0 to 5100
(x
0.1ms) 0
○
(812)
-
ML_16 Special
Distance
after latch
*4
To set up the movement after latch signal
input.
-
2
30
+1 to 2
30
-
1
(CMD_PLS
)
100
○
(814)
2 words
-
ML_17 Special
Origin return
operate direction
*4
To set up origin return direction.
0: Positive rotation
1: Negative rotation
0
○
(816.0)
-
ML_18 Special
Origin creep
speed 1
*4
To set up the creep speed after DEC signal
input in origin return.
0 to 65535
(x
100CMD_PLS/s)
50
○
(817)
-
ML_19 Special
Origin creep
speed 2
*4
To set up the creep speed after latch signal
input in origin return.
0 to 65535
(x
100CMD_PLS/s)
5
○
(818)
-
ML_20 Special
Origin distance
after latch
*4*5
To set up movement after latch signal input in
origin return.
-
2
30
+1 to 2
30
-
1
(CMD_PLS
)
0
○
(819)
2 words
-
ML_21 Special
P-Latching
allowable area
*5
To set up forward latch ready area.
-
2
31
to 2
31
-
1
(CMD_PLS)
0
○
(820)
2 words
-
ML_22 Special
N-Latching
allowable area
*5
To set up reversal latch ready area.
-
2
31
to 2
31
-
1
(CMD_PLS)
0
○
(822)
2 words
-
ML_23 Special
Deceleration
constant 1
To set up the deceleration 1 of HOLD and
SV_OFF command.
1 to 65535
(x10000CMD_PLS/s
2
)
100
○
(827)
-
ML_24 Special
*Accel/decel
constant
*6
To select acceleration /deceleration 1 and 2.
0: 1 is valid
1: 2 is valid
0
○
(833.0)
-
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
*3 Please set to "disable" when used together with KV-ML16V. Otherwise, the unit cannot work properly.
*4 When executing origin return with KV-ML16V being connected, all the settings related to origin return of KV-
ML16V are automatically changed. When origin return is complete, these settings are restored.
Therefore, do not change parameter settings during origin return.
Therefore, do not change parameter setting in origin return.
*5 Generally, it is set to "0" when used together with KV-ML16V.
*6 Generally, it is set to "1 enable" when used together with KV-ML16V.
 Loading...
Loading...