ID 442426.04 146WE KEEP THINGS MOVING
Basic properties
8
Manual SD6
8.1 Parameters
Parameters serve the following purposes:
• Adapt drive controller functionality to your application
• Display current values such as actual speed or actual torque
• Trigger actions such as "Save values" or "Phase test"
8.1.1 Parameter address
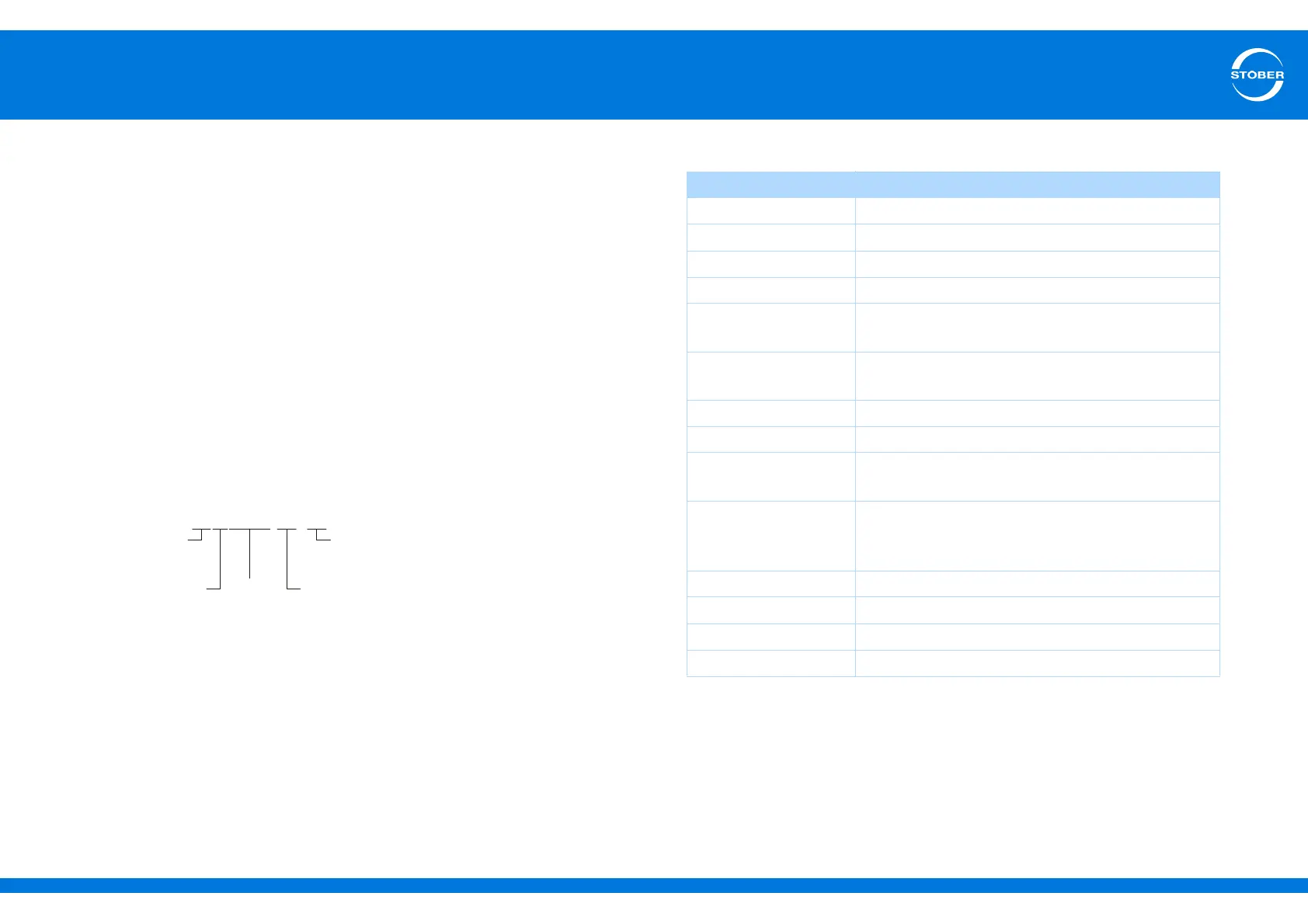
The parameter address is structured according to the example below:
The axis number identifies parameters that are set in each axis, for example
2.A150 cycle time. Global parameters are only present once for a device, for
example A35 low voltage limit.
The group divides parameters according to functional properties.
The line distinguishes between the individual parameters in a group.
The element subdivides a parameter (subfunctions).
The last place identifies the individual bits, for example in control words.
Fig. 8-1 Parameter address
The individual areas of parameter groups are listed in the following table:
1.E250[2].3
Axis
(only for axis
parameters)
Group
Line
Bit
(only for Bit parameters)
Element
(only for Array and record parameters)
Parameter group Covers area / dependency
A.. Drive controller Drive controller, communication, cycle time
B.. Motor Motor
C.. Machine Speed, torque
E.. Display values Display for device and application
F.. Terminals Analog inputs/outputs,
binary inputs/outputs, brake
G.. Technology Depends on the application, for example
synchronous motion
H.. Encoder Encoder
I.. Motion Settings for all movements
P.. Customer-specific
parameters
For programming only (optional)
Q.. Customer-specific
parameters, instance-
dependent
For programming only (optional)
R.. Production data Production data for the drive controller
T.. Scope Scope parameters
U.. Protection functions Parameterization of events
Z.. Fault counter Fault counter for events