ID 442426.04 205WE KEEP THINGS MOVING
Drive controller
9
Manual SD6
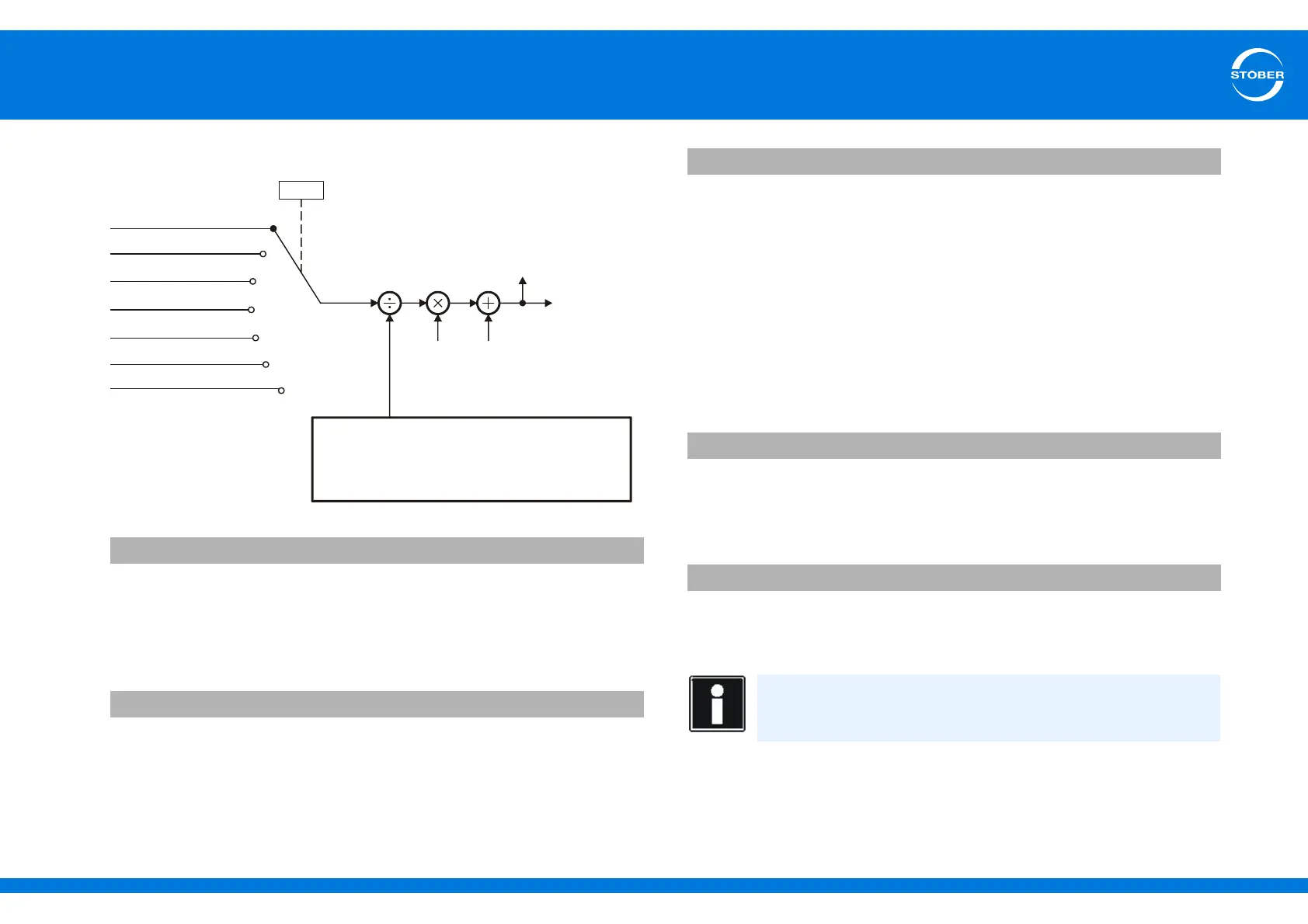
9.8.5 Position simulation
The parameter indicates which source is used for encoder simulation. The
result of encoder simulation can be observed in H82. For the simulated position
to be generated at an interface, the required form of simulation must be set in
the corresponding interface parameters.
The parameter specifies an offset for encoder simulation. This amount is added
to the value from the evaluation of the source parameterized in H80 . The sum
of the two values used for encoder simulation is displayed in H82. 65536 LSBs
correspond to one revolution (see H82).
Shows the display generated by the encoder simulation. It is derived from the
selected source position (with the parameterized transmission ratio H85 and
following) and the offset from H81.
65536 LSBs correspond to one simulated revolution.
With 25-bit SSI simulation, bits 27..3 of H82 therefore correspond to the
position generated via SSI.
With 13-bit SSI simulation, bits 15..3 correspond to the position generated via
SSI.
With incremental encoder simulation the set number of lines per revolution
applies.
Numerator H85 is divided depending on the selection in H80 by denominator
H86, H87 or H88. This makes it possible to calculate mathematically exact gear
ratios as fractions (gear drives, toothed belt drives).
The numerator H85 is divided by the denominator H86. This makes it possible
to calculate mathematically exact gear ratios as fractions (gear drives, toothed
belt drives).
H80 X120-encoder simulation source version 0
H81 encoder simulation offset version 0
H85
H81
H86, if H80 = 5:motor encoder
H87, if H80 = 1:G104, 2:virtual master
or 3:master encoder
H88, if H80 = 4:position encoder
H82
2:virtual master
4:Position encoder
5:Motorencoder
6:IGB
1:G104
0:inactive
H80
3:Master encoder
X20 and
BE encoder
H82 encoder simulation raw value version 0
H85 simulation factor nominator version 0
H86 simulation factor denominator version 0
Information
This parameter is only evaluated if the source parameterized in H80
is set to 5:Motor encoder.