ID 442426.04 35WE KEEP THINGS MOVING
Technical data
4
Manual SD6
4.5 Operating motors
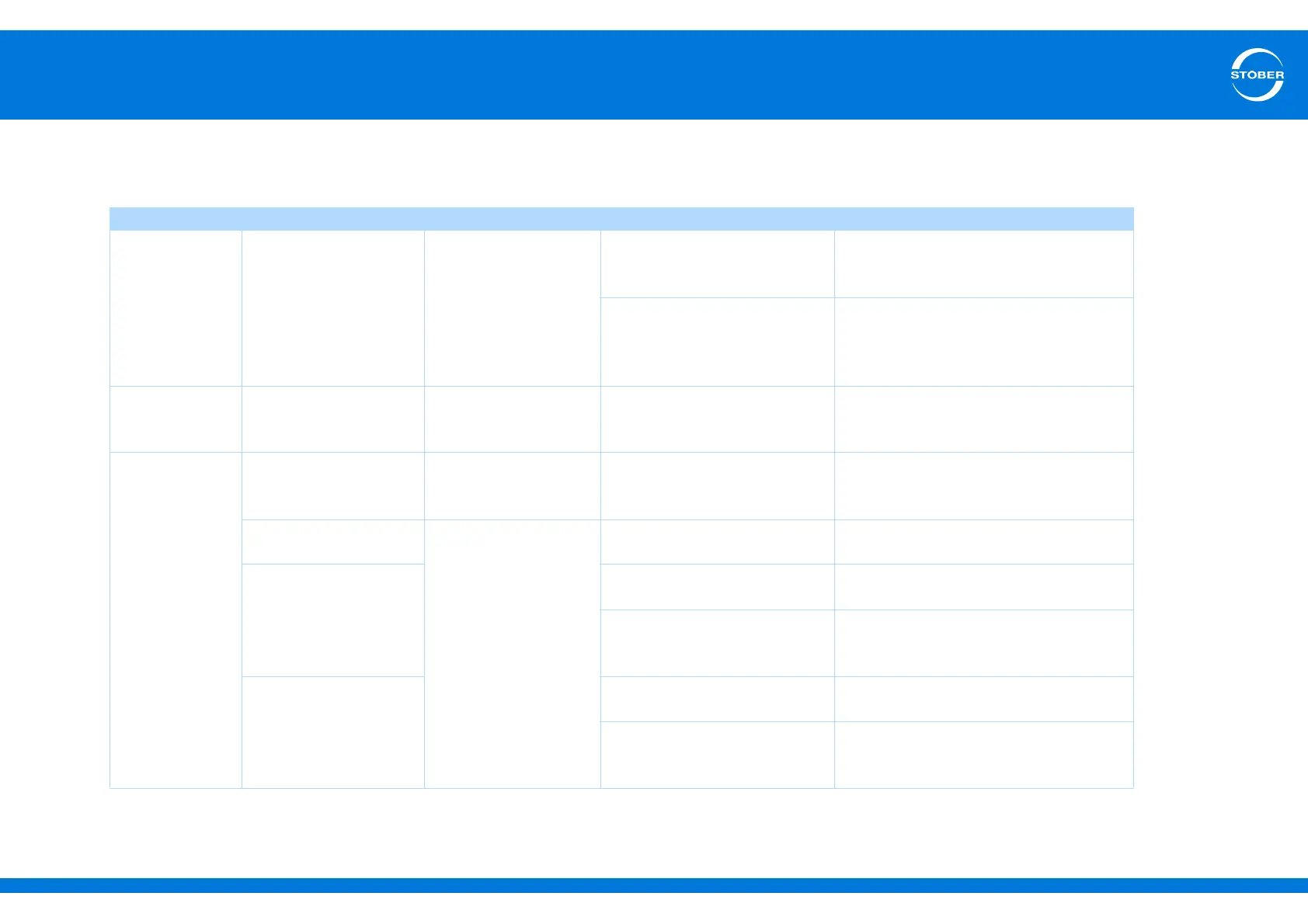
You can operate the following motors together with the specified control modes on the SD5 drive controller:
Note that the settings described here are adequate for initial commissioning and for operation with most drives. If you would like to optimize your drive, find a
description in section 15 Optimize.
Motor type B20 control mode Encoder Other settings Characteristics
Synchronous
servo motor
64:SSM - vector control
Absolute value encoder
required
Without field weakening
(B91 field weakening =
0:inactive)
High dynamics, high accuracy, very
constant speed, high overcurrent
protection
With field weakening
(B91 field weakening = 1:active)
High dynamics, high accuracy, very
constant speed, high overcurrent
protection, greater speed range, but also
higher current requirement
Synchronous
linear motor
70:SLM - vector control
Linear encoder and
commutation
information required
—
High dynamics, high overcurrent
protection
Asynchronous
motor
2:ASM - vector control Encoder required
—
High dynamics, high accuracy, very
constant speed, high overcurrent
protection
3:ASM - Sensorless
vector control
No encoder required
—
Dynamics, accuracy, constant speed,
overcurrent protection
1:ASM - V/f slip
compensated
Linear characteristic curve
(B21 V/f characteristic = 0:linear)
Very constant speed, accuracy
Quadratic characteristic curve
(B21 V/f characteristic =
1:quadratic)
Very constant speed, accuracy, especially
suitable for fan applications
0:ASM - V/f control
Linear characteristic curve
(B21 V/f characteristic = 0:linear)
Very constant speed
Quadratic characteristic curve
(B21 V/f characteristic =
1:quadratic)
Very constant speed, especially suitable
for fan applications