ID 442426.04 250WE KEEP THINGS MOVING
Encoder
12
Manual SD6
This section describes the settings required for evaluating an encoder on the
drive controller.
Note that the settings for simulating encoder signals (position simulation) are
described in section 9.8.5 Position simulation.
12.1 Types
A number of different encoder types are used with drive controllers:
• Motor encoder
• Position encoder
• Master encoder
The motor encoder the encoder placed on the motor shaft in the axis model.
The signal of the motor encoder is used to regulate the motor. You can select
the interface to which the motor encoder is connected in B26.
The position encoder is an encoder placed on a downstream mechanical part
in the axis model. The signal of the position encoder is used for position control.
You can select the interface to which the position encoder is connected in I02.
Section 12.3 Selecting an interface explains which interfaces are available.
The various axis models are described in section 13.3 Scale axis.
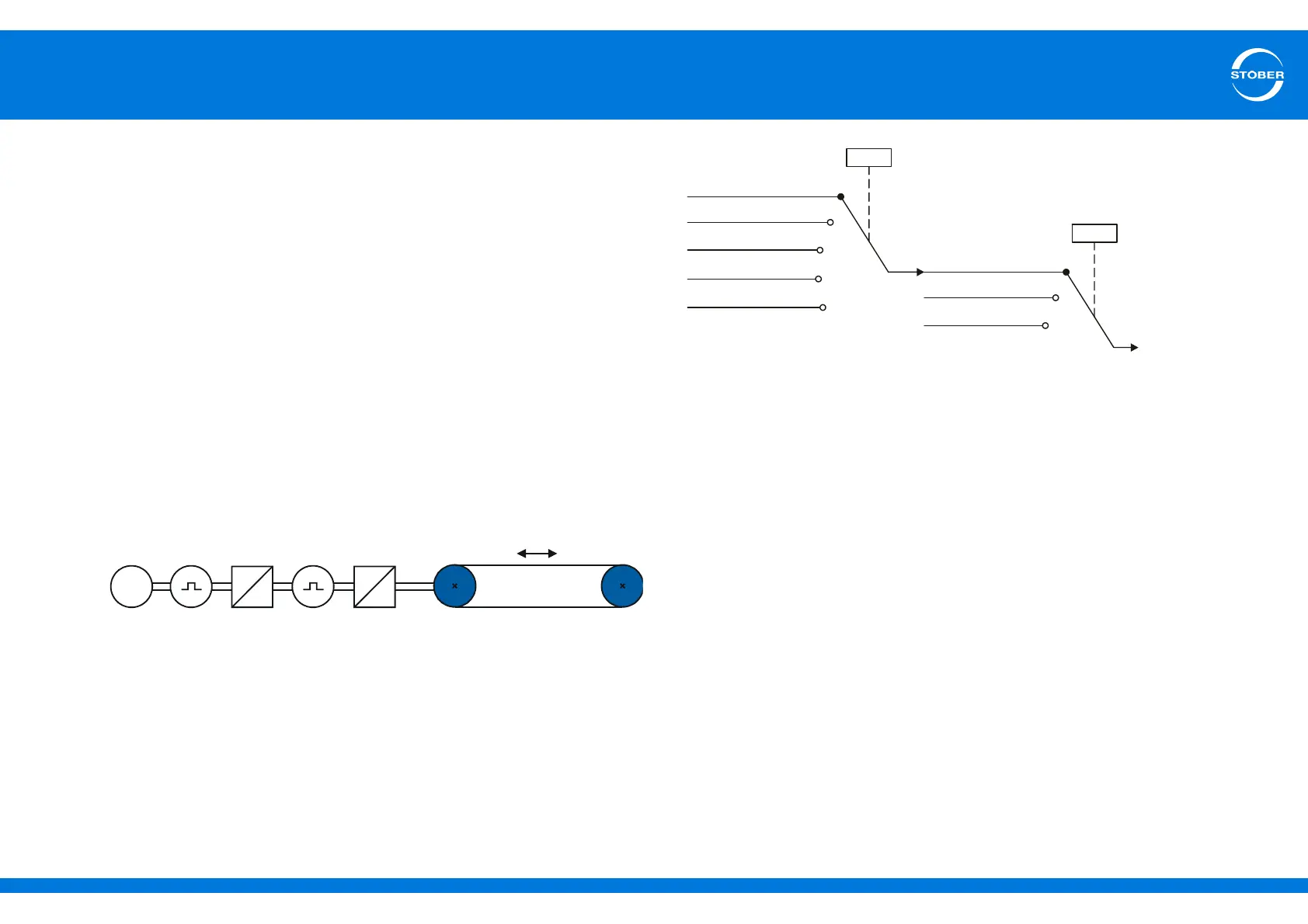
The master encoder is a real encoder that returns the position of the master.
The drive controller is synchronized to the master position. You can select the
interface to which the motor encoder is connected in G104. Note that you must
parameterize G27 = 1:G104 for the signals of the master encoder to be used
for control.
Note also that at present no master functionality can be used.
12.2 Deactivating an encoder
Select B26 = 0:inactive if an asynchronous motor without speed feedback will
be used (B20 control mode = 0:V/f control or 1:sensoress vector control). The
setting is not permitted if you would like to operate synchronous servo motors,
synchronous linear motors or asynchronous motors with vector control.
If you are not using a position encoder, set I02 = 0:motor encoder.
2:X4-encoder
4:X120-encoder
1:BE-encoder
0:inactive
G104
3:X140-encoder
Master
position
 Loading...
Loading...





