ID 442426.04 303WE KEEP THINGS MOVING
Optimize
15
Manual SD6
15.1.1.3 Control mode
15.1.1.3.1 Operation without field weakening
Number of poles of a synchronous servo motor or asynchronous motor.
If the number of pole pairs is specified for third-party motors, the value must be
multiplied by 2 before it is entered.
Correlation between the number of poles, nominal speed n
N
in rpms and the
nominal frequency f
N
in Hz of the motor: B10 = 2·(f
N
· 60/n
N
).
Frequency of the voltage applied to the motor.
The speed determined from the motor encoder specified in B26. If the control
mode in B20 does not require an encoder and none is parameterized in B26,
the speed from the motor model will be displayed.
Display of the current torque or force as a percentage. Unsmoothed, in contrast
to E02. The reference value for consideration on the load side is C09, for
consideration on the motor side B18.
Display of the current motor speed. Unsmoothed, in contrast to E08. If the drive
is operated without feedback, this speed is determined by calculations using
the motor model (the actual motor speed may differ in this case from the
calculated speed).
Torque generating current in amps.
Reference value of the magnetization current.
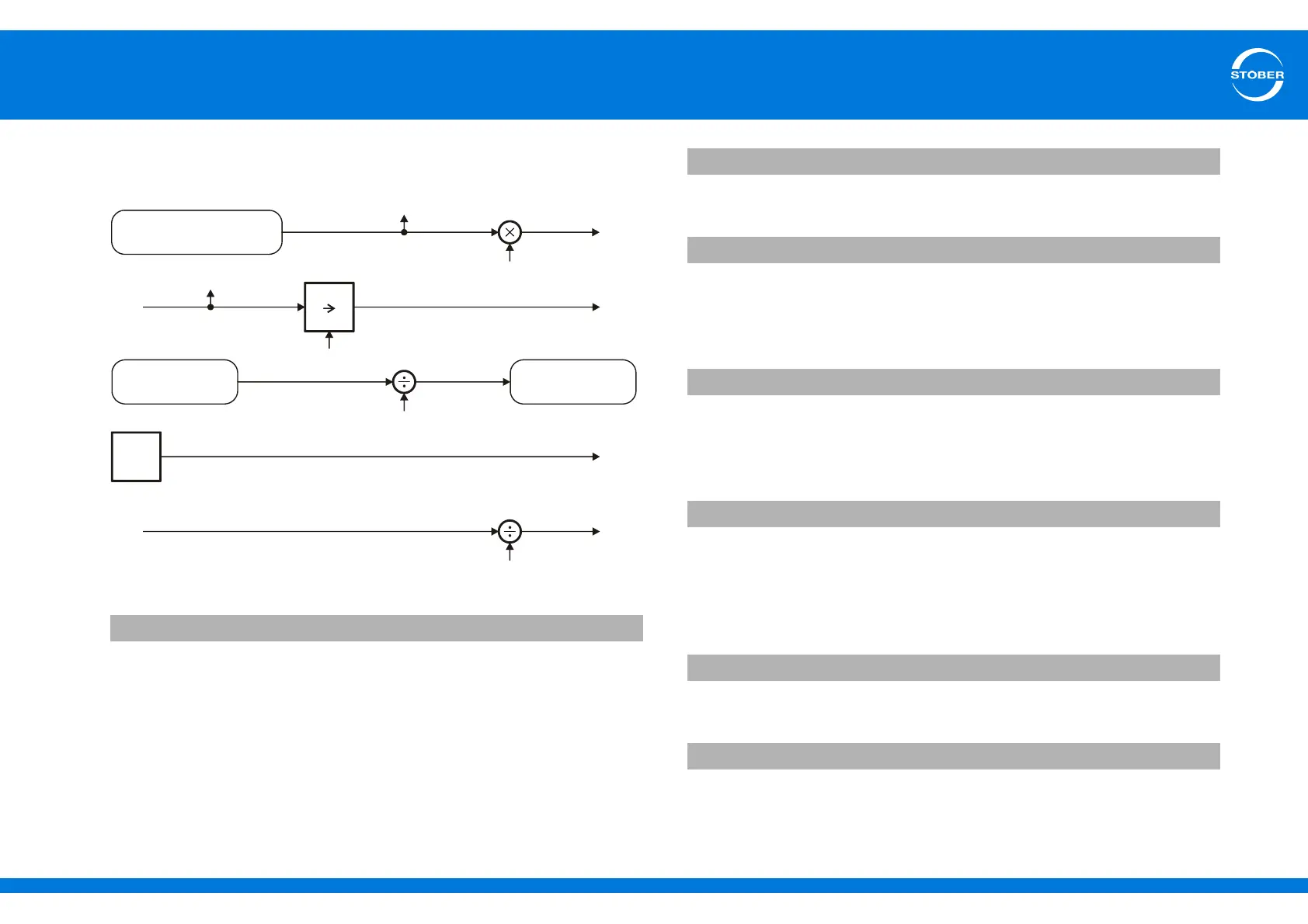
B10 motor-poles version 0
E172
E166
E170
M/F-ref for
speed controller
Maximum
permitted current
Maximum
permitted torque
n f
E91
B10
E15
E172
E172
0
E165
E93
E05
E90
E05 f1-Motor version 0
E15 v-motor-encoder version 0
E90 actual torque/ force version 0
E91 v-motor version 0
E93 I-q version 0
E165 Id-ref version 0