ID 442426.04 316WE KEEP THINGS MOVING
Optimize
15
Manual SD6
With C31 = 100% and a speed deviation of 32 rpm for asynchronous motors
and synchronous servo motors, the P part of the speed controller returns the
stall torque M
0
as a reference value to the current or torque controller.
With C31 = 100% and a speed deviation of 3.2 m/min for synchronous linear
motors, the P part of the speed controller returns the static force F
0
as a
reference value to the current or force controller.
Time constant of the I-part in the speed controller. A small integral action time
results in a high integration speed, thereby increasing the static rigidity of the
drive. A small integral action time can lead to overshoots in dynamic processes
in the target position. In this case C32 should be increased. When C32 is < 1
ms the I controller is deactivated.
With C31 = 100 % and a speed deviation of 32 rpm after an integral action time
of C32 the I-part of the speed controller returns the nominal motor torque/force
as a reference value for the current or torque/force controller.
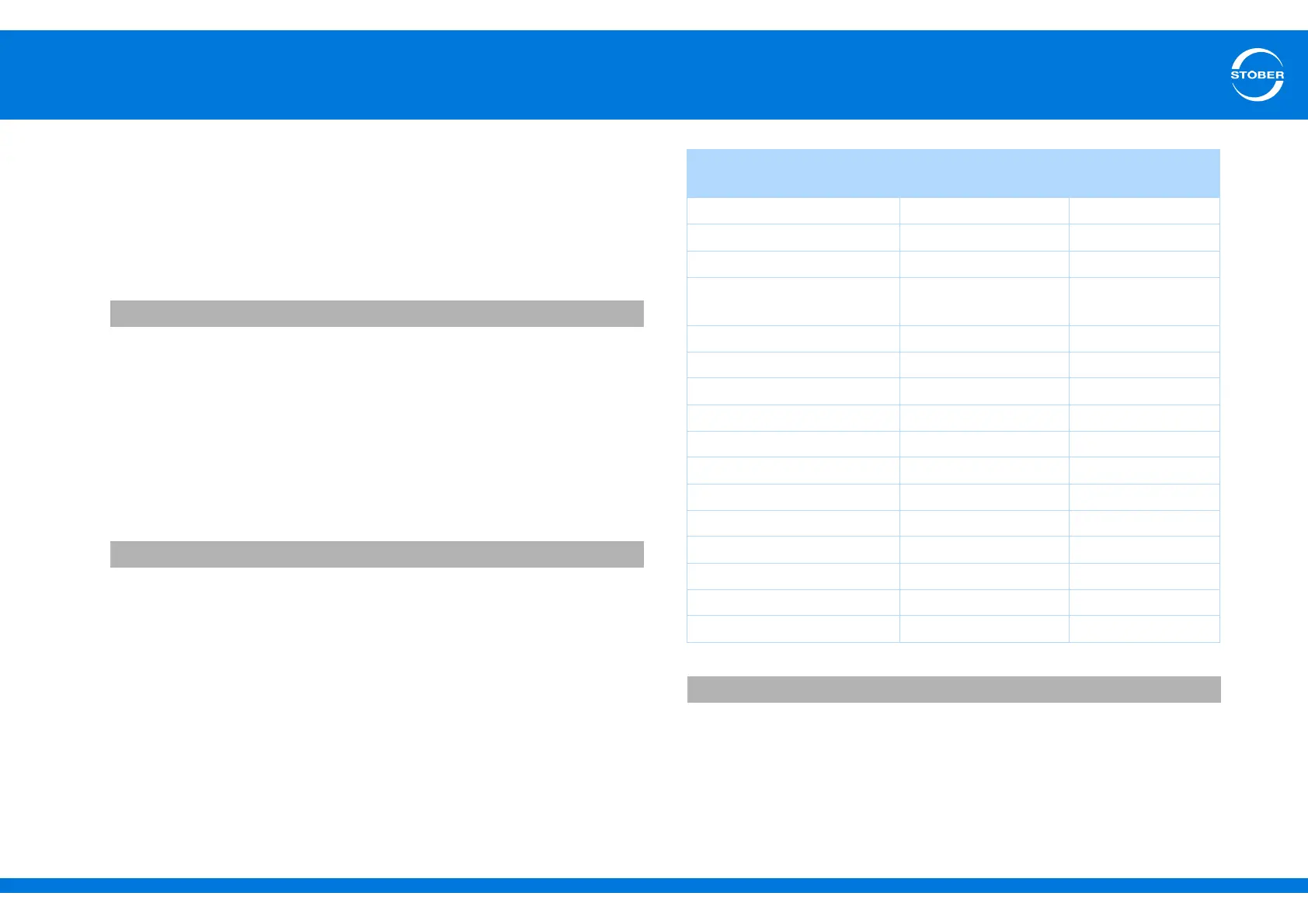
Filter time constant for the current motor encoder speed E15.
C34 affects how smoothly the motor runs and the dynamics that can be
achieved with the drive. As C34 increases, the motor runs more quietly and
dynamics decrease. The minimum value of C34 depends primarily on the
accuracy of the encoder that is used. The table below contains approximate
values for C34.
Smoothing time constant in ms for the torque/force value on the output of the
speed controller. Used to suppress vibrations and resonances. The effect of
torque/force smoothing can be metered with C37.
C32 integral time v-ctrl version 0
C34 actual motor speed low pass version 0
Encoder designation Encoder evaluation Approximate value
of C34 [ms]
ECN 1113, EQN 1125 EnDat 2.1 0,8 - 1,2
EQN 1325 EnDat 2.1 0,8 - 1,2
ECI 1118, EQI 1130 EnDat 2.1 1,4 - 1,8
ECI 1319, EQI 1329,
EQI1331
EnDat 2.1 1,2 - 1,8
ECI 1119, EQI 1131 EnDat 2.2 0,4 - 0,6
ECI 119, EBI 135 EnDat 2.2 0,4 - 0,6
ECN 1123, EQN 1135 EnDat 2.2 0,1 - 0,4
ECN 1325, EQN 1337 EnDat 2.2 0,0 - 0,2
ECI 1118-G2, EBI 1135 EnDat 2.2 0,4 - 0,6
EQN 1125 EnDat SinCos 512 0,4 - 0,8
EQN 1325 EnDat SinCos 2048 0,2 - 0,8
SKS36, SKM36 Hiperface SinCos 128 0,6 - 1,0
Resolver (2-pole) Similar 1,4 - 2,0
Incremental 1024 HTL/TTL 2,0
Incremental 2048 HTL/TTL 1,4
Incremental 4096 HTL/TTL 0,8
C36 reference torque/force low pass version 0