ID 442426.04 328WE KEEP THINGS MOVING
Optimize
15
Manual SD6
Nominal frequency of the motor as per rating plate. Parameters B14 and B15
define the pitch of the V/f characteristic curve and thereby the characteristics
of the drive. The V/f characteristic curve determines the frequency (B15 f-
nominal) at which the motor is operated at nominal voltage (B14 V-nominal).
The voltage and frequency can be increased linearly beyond the nominal point.
The upper voltage limit is the supply voltage that is applied. STOBER system
motors up to size 112 offer the option of star/delta operation. Delta operation at
400 V makes it possible to increase output by a factor of 1.73 with an extended
adjusting range and at a constant torque. The motor requires additional current
in this connection variant. Make certain the following points are observed:
• The drive controller must be designed for the corresponding output (P
delta
= 1.73 · P
star
).
• B12 (I-nominal) is parameterized to the appropriate nominal motor current
(I
delta
= 1.73 · I
star
).
Moment of inertia J for synchronous servo motors and asynchronous motors
or mass of the slide for linear motors.
Specify the constant load torque for slow speeds (<5% of B13 Nominal speed)
in C21 in control mode B20 = 3:ASM - Sensorless vector control. C21 has no
meaning for higher speeds. (friction, force of gravity for vertical axes, etc.). The
reference quantity for C21 is B18 related torque. The torque specified in C21
always refers to the motor shaft.
The total torque consists of an acceleration torque and C21 together. The
acceleration torque is calculated from the mass moment of inertia of the overall
system and the acceleration. C21 is not included in the braking torque, which
is calculated from the braking ramp only.
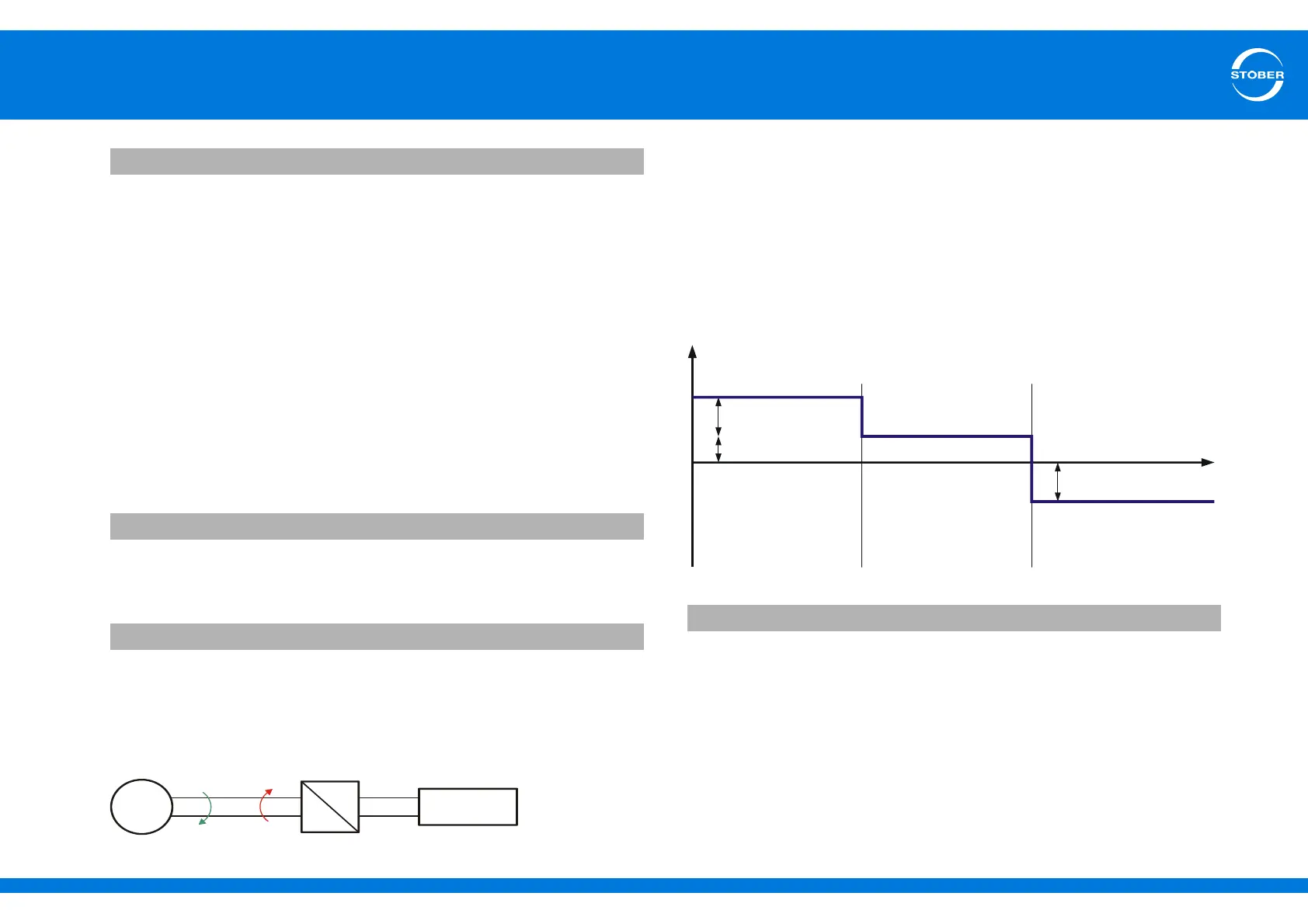
The effects of C21 can be seen in the E166 Iq-ref. If the load torque that is
actually applied is considerably less than C21, jerks may occur during startup
as well as large stationary deviations in speed. If C21 is considerably less than
the load torque, the motor cannot accelerate.
Ratio of the mass moment of inertia of the load to the motor. C30 is included in
the calculation of acceleration and braking torques in the low speed range (< 5
% of nominal speed).
B15 nominal motor frequency version 0
B62 motor inertia version 0
C21 start-up torque version 0
C30 J-Last / J-Motor version 0
E166 Iq-ref
acceleration
torque
C21
constant travelacceleration brake
brake torque