5-110 F650 DIGITAL BAY CONTROLLER GEK-106310-AF
5.5 CONTROL ELEMENTS CHAPTER 5: SETPOINTS
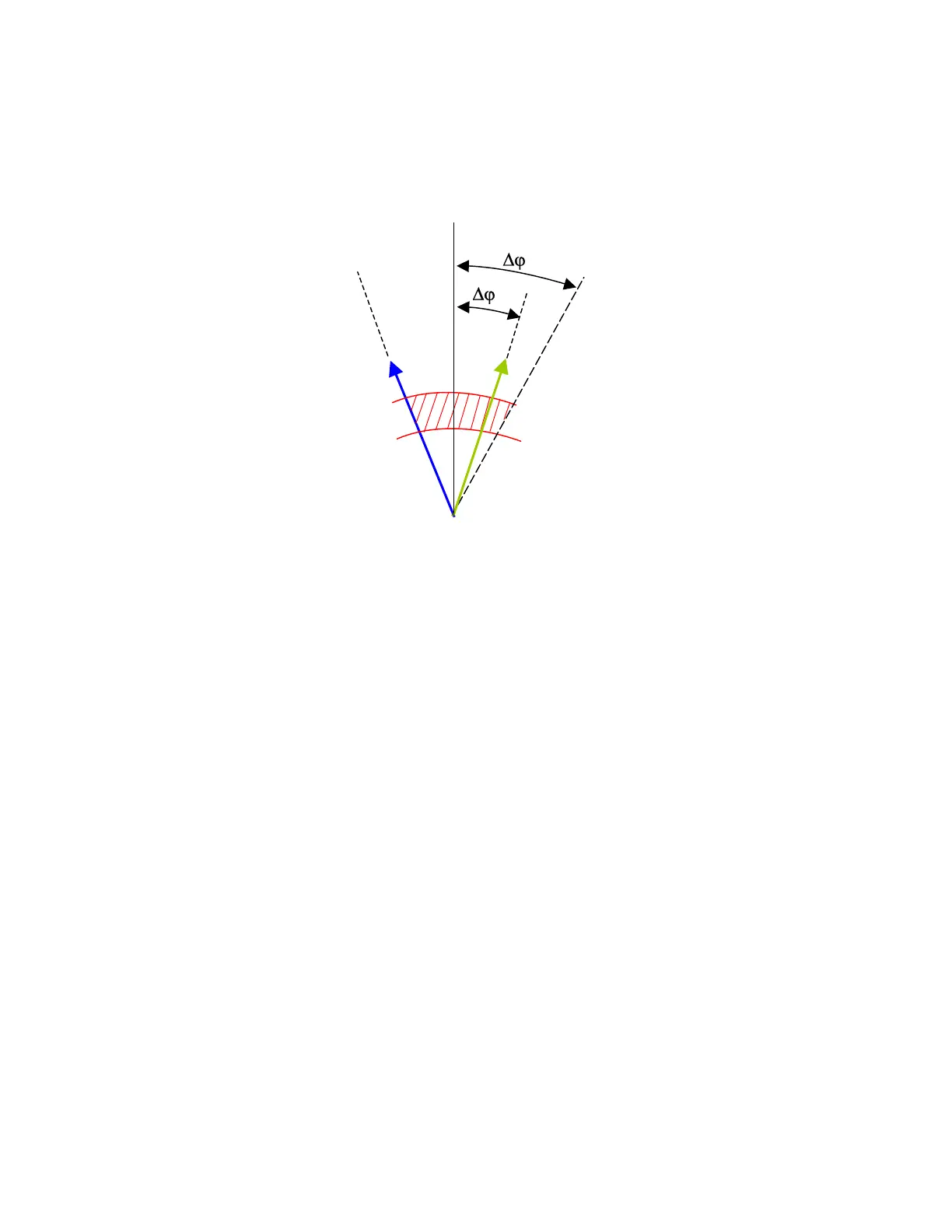
Phase Angle Difference Dj
In the live line-live bus Condition, once the voltage difference has been successfully verified in magnitude, the system
establishes the angle difference between both voltage phasors. If the angle difference is lower than the Dj
set
(Max Angle
Difference) setting, then the system verifies the frequency slip S (Max Freq Difference).
Figure 5-24: Voltage angle difference
In the live-live bus condition, once the voltage difference has been successfully verified in magnitude, the relative
frequency slip between phasors is calculated. From the information obtained from the relay, the algorithm knows the slip
(mHz) of both phasors,and it takes as reference (VRef) the lowest frequency phasor. The behaviour of the algorithm
depends on the slip frequency and the breaker close time as follows:
1. If the relative slip, ∆f, is equal or lower than 20 mHz, the algorithm gives permission to close as soon as the angle
difference is slower than the ∆?set (Max Angle Difference), because at such a low speed, the hold time for getting an
“in-phase” closing permission would be too long.
2. If the relative slip is higher than 20 mHz, the element per
forms an anticipative algorithm, determining the right
moment to give the closing command to the breaker, so that the breaker closes when the line and busbar voltages are
in phase. When the difference between voltage values equals “two times” the set angle as maximum angle difference
(∆V = ∆Vset), the anticipative algorithm starts running and uses the set breaker closing time to establish the initiation
of permission, so that it is executed in the moment when both voltage phasors are completely in phase, thus
minimizing the voltage difference in the breaker chamber to negligible values. The main benefit is that after a
considerable number of breaker operations, damage to internal connection elements, as well as to the chamber
isolating element is drastically reduced, ensuring a longer life for the breaker, and reducing costly maintenance
operations.
3. If the product of frequency slip and breaker closing time is higher than Max Angle difference and lower than two times
this setting
, as an in phase close is not possible, the algorithm ensures that the difference between voltages in the real
closing moment is not higher than the set value (Max Volt Difference).
4. If this product is beyond two times Max Angle difference, closing operation is not allowed.