Chapter 5 Memory and Parameter
5.1.2 Device
1. Types of devices
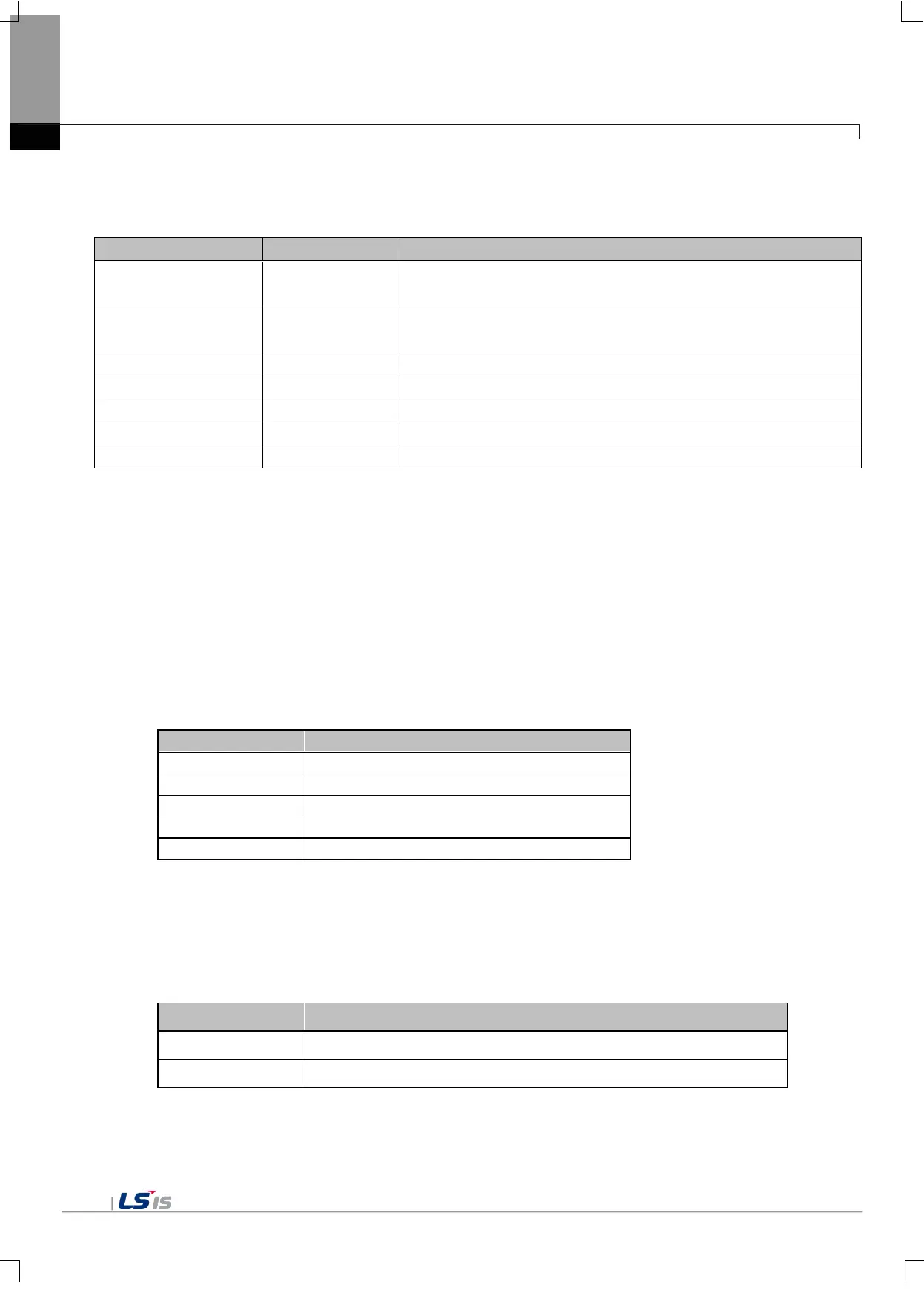
Types of device supported in motion control module are shown in the Table below.
Automatic variable (A) 4,096KB
Automatic variable area
(able to set 2,408KB of retain)
Direct variable (G) 2,048KB
Internal device area
(able to set 1,024KB of retain by selecting in the area of basic parameter)
Input variable (I) 16KB Built-in digital input, TxPDO data of the EtherCAT slave
Output variable (Q) 16KB Built-in digital output, RxPDO data of the EtherCAT slave
System variable (F) 128KB Variables related to motion control status and module operation status
Built-in analog operations and state variables
Special variable (U) 18KB SD memory, data log and encoder flag area
(1) Automatic variable
(a) This is a variable to be automatically assigned the position of variables by compiler; user does not need to specify the
position of internal variable. The variables, which user sets but does not assign specific position, are assigned to automatic
variable.
(b) The automatic variables that do not have Retain Settings are initialized to 0 when power is applied again or at Stop-to-Run.
(2) Direct variable
(a) This is a variable which user forces the position of memory to be assigned by using the name and number of a device
directly.
(b) The range of address assignment where direct variable is available is as follows.
Designated range of Variable address
(3) Input variable
(a) This is a variable assigned to built-in digital input and TxPDO of EtherCAT slaves.
(b) Built-in digital input is 8 points.
(c) Input variable is expressed as follows.
%I[size prefix]n
X(1 bit), B(1 byte), W(1 word), D(1 double word), L(1 long word)
n data based on [size prefix] among data

 Loading...
Loading...
