Chapter 8 Motion Control Function
8.4.4 Machine Information Setting
To operate the robot using coordinate system operation, the type of the robot (machine) and the machine parameters should be set at
the axes group parameter in advance. Machine parameters can be set using MC_SetKinTransform function block. XG5000 axes
group parameters can be set using the same.
1. Machine information, machine type setting
In the machine type settings, select the type of machine (robot) to perform coordinate system operation. Either XYZ or
Delta3 can be selected as the robot type.
(1) XYZ(Cartesian coordinates) robot
XYZ is a robot type with servo motors connected to X/Y/Z axes, which can perform the operation in Cartesian coordinates,
and it does not require additional kinematic analysis between ACS and MCS.
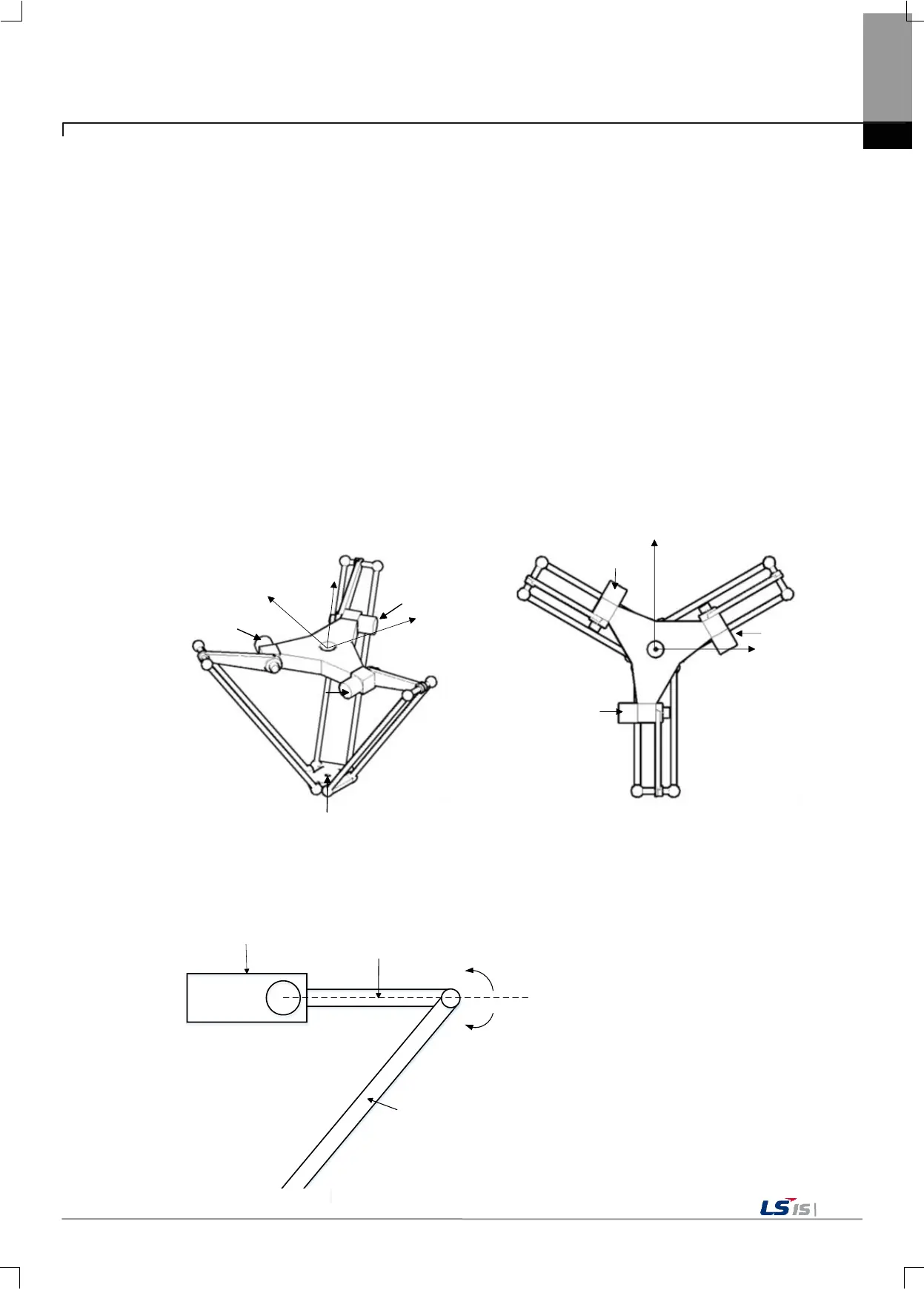
(2) Delta3
MCS of the Delta robot
In case of a Delta robot, the center of Fixed Frame is defined as MCS, and the relationship between each axis connected to
Delta and MCS are as shown below.
X mcs
Y mcs
Axis1
Axis2
Axis3
X mcs
Y mcs
Z mcs
TCP
Axis2
Axis1
Axis3
ACS of the Delta robot
The direction of the link connected to Delta's fixed frame facing the floor is defined as the forward direction of the axis
operating the link, and the other direction is defined as the opposite direction.
Fixed frame
Fixed frame link
Moving frame link
Forwar
d
0
Reverse

 Loading...
Loading...
