Chapter 8 Motion Control Function
2. Machine information, machine parameter setting
(1) XYZ
XYZ robot does not require separate machine parameters, as the position of each axis matches the XYZ coordinates of
TCP.
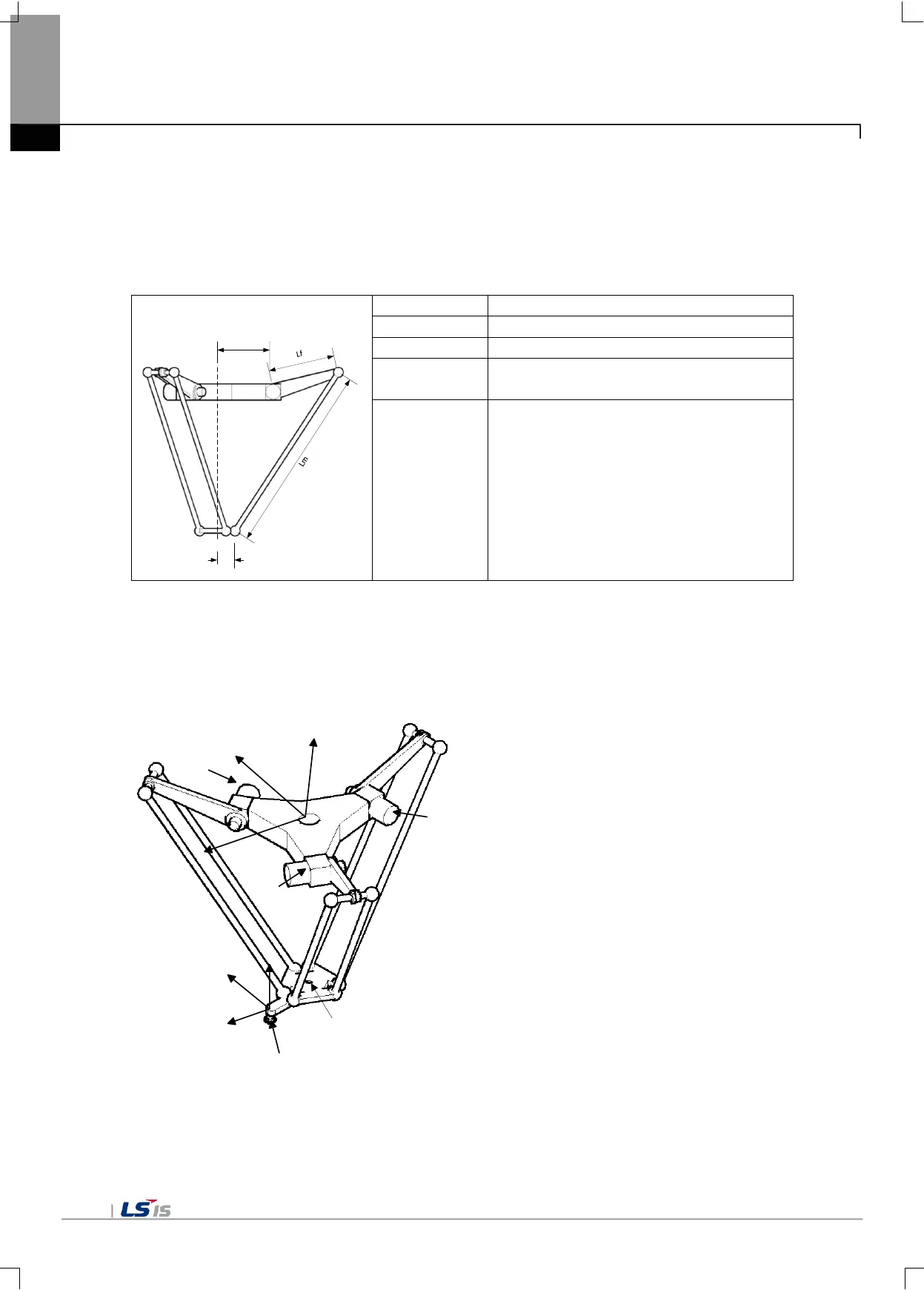
(2) Delta3
Lf:Link length of the fixed frame(mm)
Lm: Link length of the moving frame(mm)
Rf: Length from the center of the fixed frame to
the link of the fixed frame(mm)
Rm: Length from the center of the moving frame
to the link of the moving frame(mm)
3. Machine information, tool offset setting
A tool offset function is provided in addition to the machine information, as additional equipment may be connected to the
end of the robot's TCP. Activating tool offset applies the offset to the TCP target position applied to the coordinate system
operation.
TCP
TCP applied with Offset
Y mcs
X mcs
Z mcs
Axis1
Axis3
Axis2
ToolOffsetY
ToolOffsetX
ToolOffsetZ

 Loading...
Loading...
