Chapter 6 Motion Function Blocks
6.3.6 Relative positioning operation (MC_MoveRelative)
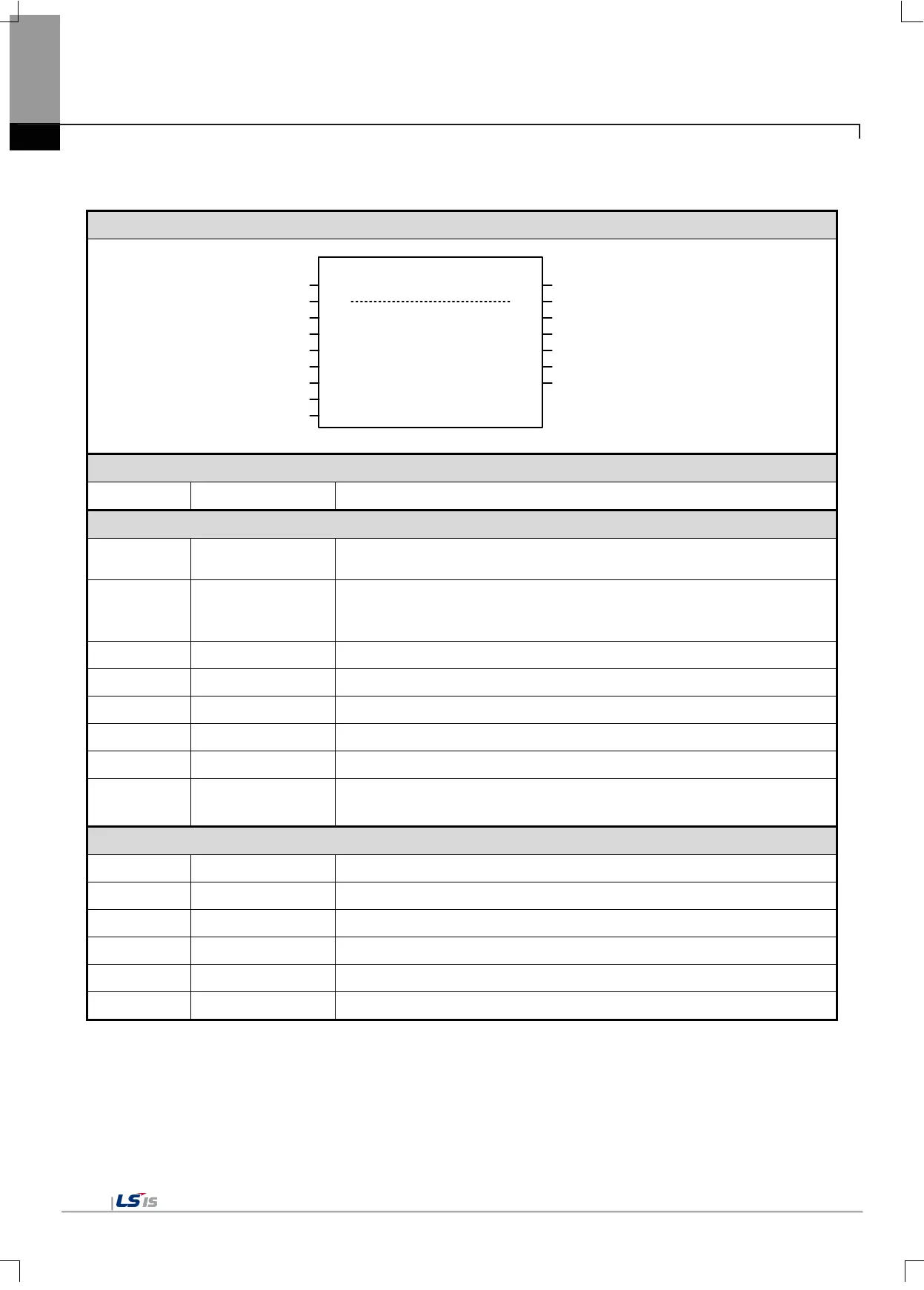
Specify the axis to be commanded (1~32: real/virtual axis, 33~36: virtual axis)
BOOL Execute
Give an absolute position operation command to the relevant axis in the rising
Edge.
BOOL ContinuousUpdate
Specify the update setting of input value.
(Refer to 6.1.5.Changes in Parameters during Execution of Motion Function
Specify the target distance.
Specify the maximum speed. [u/s]
Specify the acceleration. [u/s
2
Specify the deceleration. [u/s
2
Specify the change rate of acceleration/deceleration. [u/s
3
UINT BufferMode
Specify the sequential operation setting of motion function block.
(Refer to 6.1.4.BufferMode)
Indicate whether to reach the specified distance.
Indicate that the execution of motion function block is not completed.
Indicate that the current motion function block is controlling the relevant axis.
Indicate that the current motion function block is interrupted while it is running.
Indicate whether an error occurs or not.
Output the number of error occurred while motion function block is running.
(1) This motion function block is to give relative position operation command to the relevant axis.
(2) Relative position motion (MC_MoveRelative) is the motion function block which moves as far as the target distance specified in
Distance input from the current position.
(3) Moving direction is decided depending on the sign of the target distance specified in Distance input, and positive
(+ or No sign) moving direction leads to the forward direction, and negative (-) moving direction leads to the reverse direction.
MC_MoveRelative
AxisAxis
Execute Done BOOL
UINT
BOOL
UINT
BOOL ContinuousUpdate
LREAL Distance
Busy BOOL
CommandAborted BOOL
Error BOOL
ErrorID WORD
LREAL Velocity
Active BOOL
LREAL Acceleration
LREAL Deceleration
LREAL Jerk
UINT BufferMode

 Loading...
Loading...
