Chapter 6 Motion Function Blocks
6.3.10 Relative position operation ending with specified velocity operation
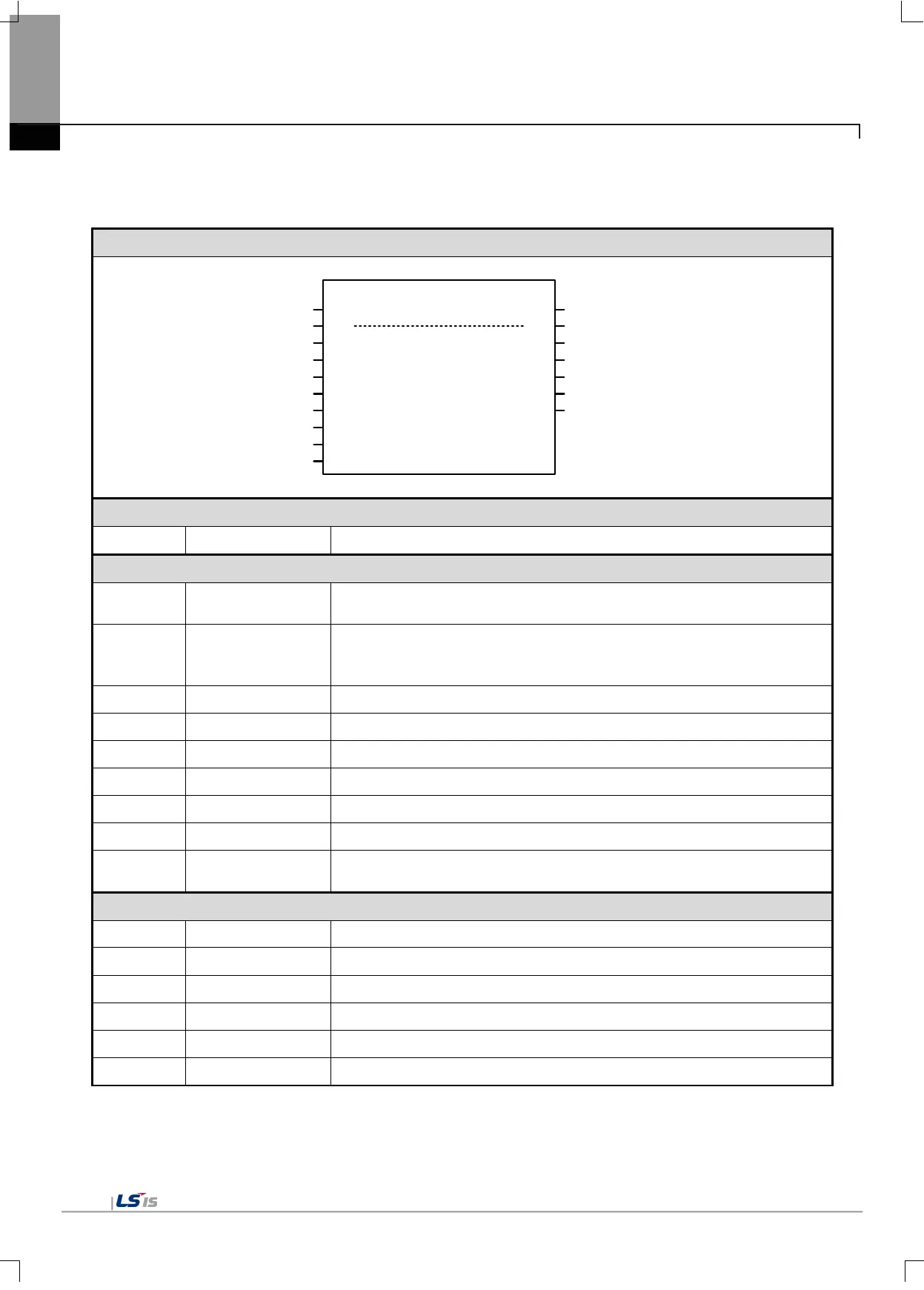
(MC_MoveContinuousRelative)
Specify the axis to be commanded (1~32: real/virtual axis, 33~36: virtual axis)
BOOL Execute
Give an absolute position motion command to the relevant axis in the rising
Edge.
BOOL ContinuousUpdate
Specify the update setting of input value.
(Refer to 6.1.5.Changes in Parameters during Execution of Motion Function
Block)
Specify the target distance.
Specify the operation speed after reaching the target position. [u/s]
Specify the maximum speed to reach the target position. [u/s]
Specify the acceleration. [u/s
2
Specify the deceleration. [u/s
2
Specify the change rate of acceleration/deceleration. [u/s
3
UINT BufferMode
Specify the sequential operation setting of motion function block.
(Refer to 6.1.4.BufferMode)
Indicate the operation at the specified speed after reaching the target position.
Indicate that the execution of motion function block is not completed.
Indicate that the current motion function block is controlling the relevant axis.
Indicate that the current motion function block is interrupted while it is running.
Indicate whether an error occurs or not.
Output the number of error occurred while motion function block is running.
(1) This motion function block gives MC_MoveContinuousRelative command to the relevant axis.
(2) When executing MC_MoveContinuousRelative, the relevant axis operates at the speed specified in EndVelocity after
moving the distance specified in Distance if there is no motion function block is on standby.
MC_MoveContinousRelative
AxisAxis
Execute InEndVelocity
UINTUINT
BOOL BOOL
BOOL ContinousUpdate
LREAL Distance
Busy BOOL
CommandAborted BOOL
Error BOOL
ErrorID WORD
LREAL EndVelocity
Active BOOL
LREAL Velocity
LREAL Acceleration
LREAL Deceleration
LREAL Jerk
UINT BufferMode

 Loading...
Loading...
