Chapter 6 Motion Function Blocks
(5) For MC_CAMIN function block, only the following inputs can be updated: MasterOffset, SlaveOffset, MasterScaling,
SlaveScaling, MasterStartDistance, and MasterSyncPosition(If InSync=On, only MasterOffset, SlaveOffset,
MasterScaling, and SlaveScaling are updated. )
(6) For MC_GEARIN function block, only the following inputs can be updated: RatioNumerator, RatioDenominator,
Acceleration, and Deceleration (If InGear=On, only RatioNumerator and RatioDenominator are updated.)
6.1.6 Group Operation Route Change Settings
When the axis group of the current motion controller is executing a command, other command can be issued to the relevant axis
group. At this point, the path, which the next command will achieve, can specify how the existing command will be connected to the
existing path. The parameter of connection track is specified in TransitionParameter input.
0 TMNone
Do not generate a connection track.
3 TMCornerDistance
Generate a connection track which specifies the corner distance of a
connection track and draws circular arcs at the specified corner
1. TransitionMode “TMNone”
Connection track is not generated. TransitionMode input is available only to “TMNone” in case BufferMode input of motion
function block is “Aborting” or “Buffered”.
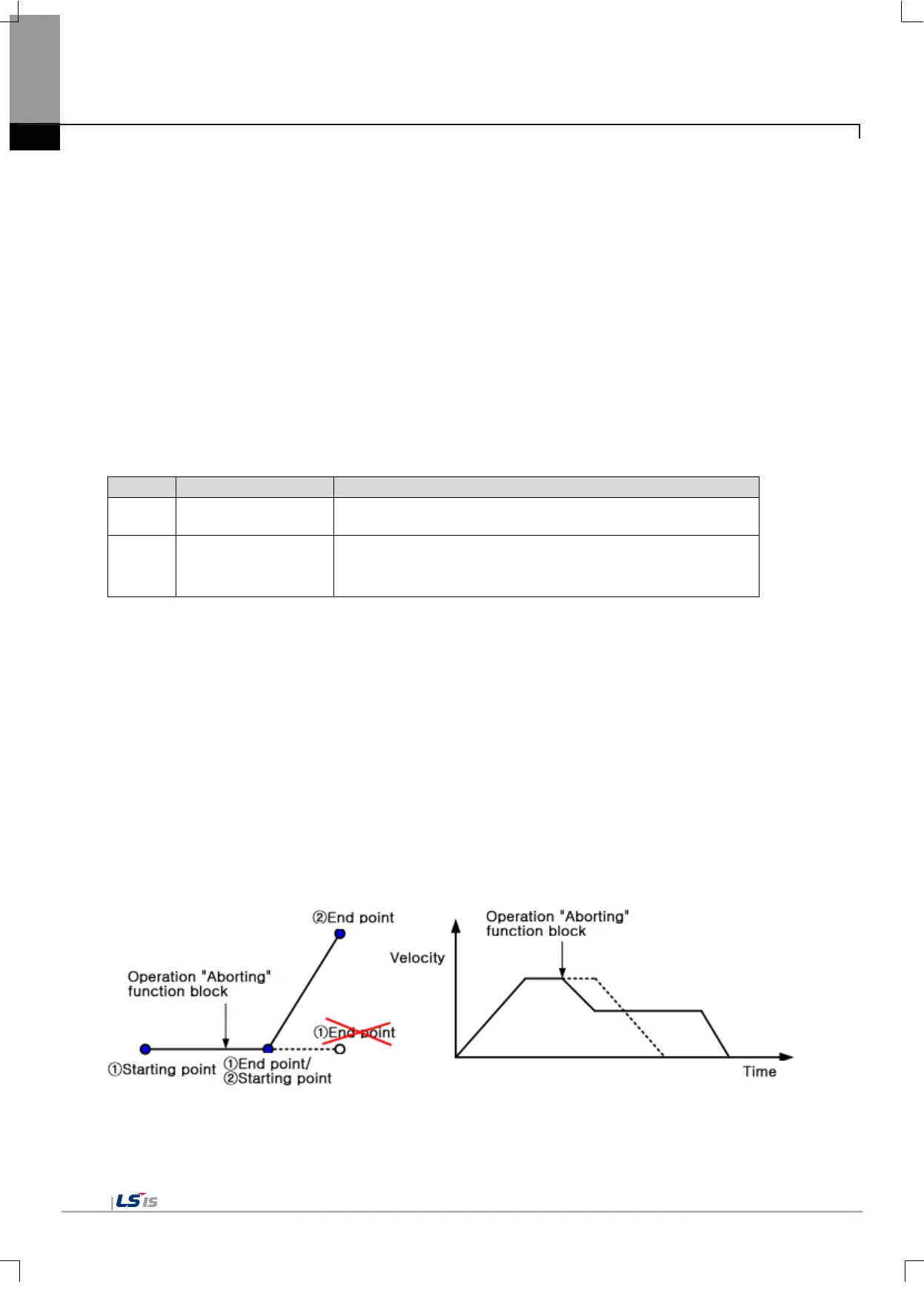
The Figure below shows the case when running BufferMode of motion function block in the setting of ‘Aborting’. The Figure in
the left shows that motion function block ② is executed in the setting of ‘Aborting’ while motion function block ① is running.
Motion function block ① is forced to be terminated at 'end point ① / starting point ②' without reaching 'end point ①'. The
Figure in the right shows that the next motion function block is executed at the moment of the execution of ‘Aborting’ function
block.
<In case BufferMode is specified as “Aborting”>

 Loading...
Loading...
