Chapter 8 Motion Control Function
8.4.5 Work Space Setting
For coordinate system operation, in order to prevent machine damage or safety accident caused by the robot performing impossible
motion, a work space function is provided to prevent the robot from going out of the preset work space. Coordinate system operation is
not performed if the robot's current position or target position is outside the work space. Work space setting can be performed using
LS_SetWorkspace function block. XG5000 axes group parameters can be set using the same
1. Work space setting
Perform work space settings, and the occurrence of work space error can be set. Set the workspace type set in the
WorkspaceType as the work space parameter set in the WorkspaceParam in the axis group specified in the set AxesGroup
inputIf WorksaceError value is set to 0, the operation continues without errors even when it goes out of the work space.
Work space settings cannot be performed while the axes group is in operation.
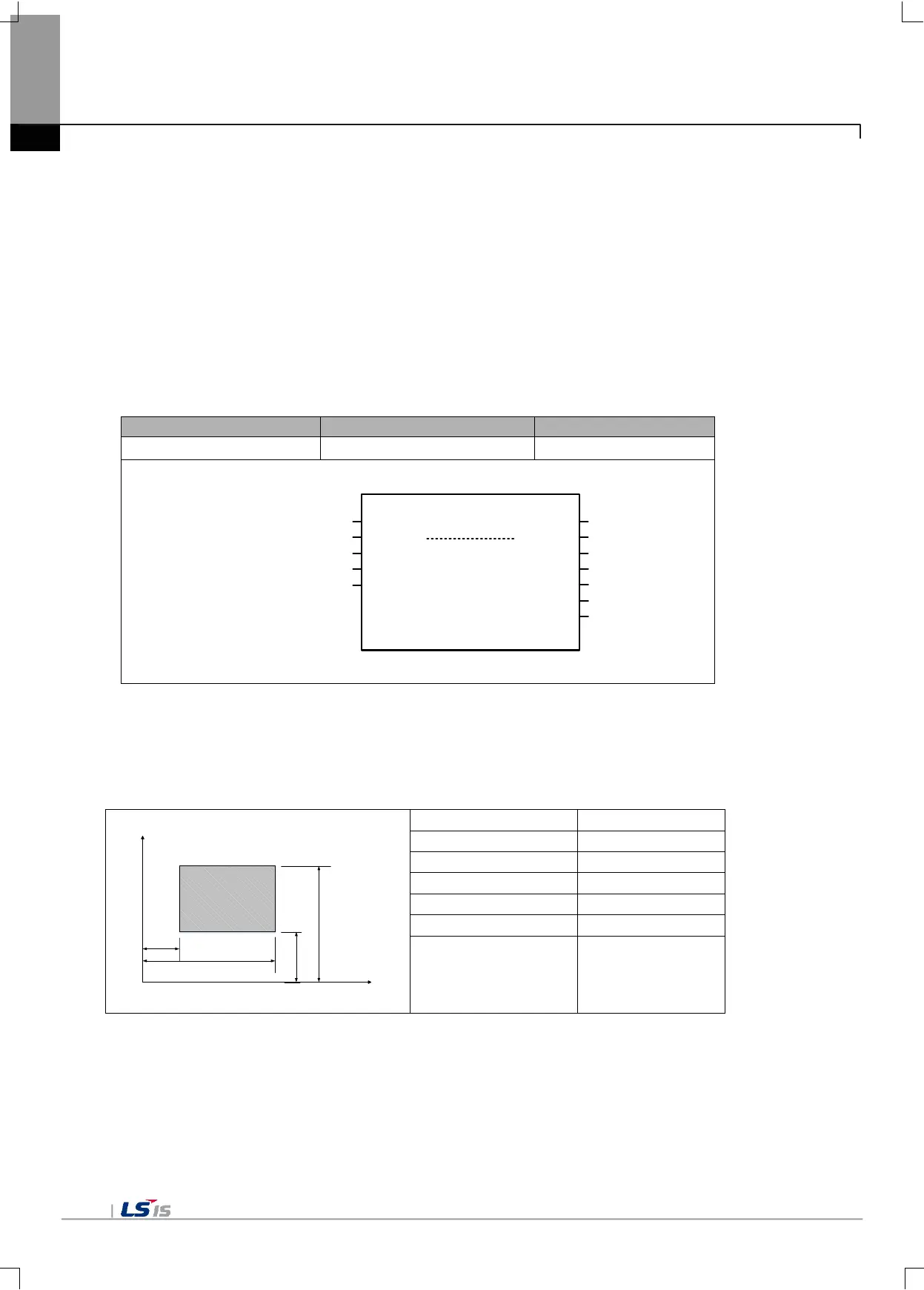
LS_SetWorkspace
DoneExecute
AxesGroup AxesGroup
BOOL
BOOL
UINT UINT
UINT WorkspaceType
BOOL WorkspaceError
Busy BOOL
CommandAborted BOOL
Error BOOL
ErrorID WORD
Active BOOL
ARRAY[0..8] OF LREAL[ ] WorksapceParam
2. Work space type and parameter
The work space type supports 4 types of Rectangle/Cylinder/Delta/Sector.
Rectangle
Ymin
Ymax
Xmin
Xmax
X Axis
Y Axis

 Loading...
Loading...
