Chapter 6 Motion Function Blocks
6.6.10 Read ESC (LS_ReadEsc)
LS
_
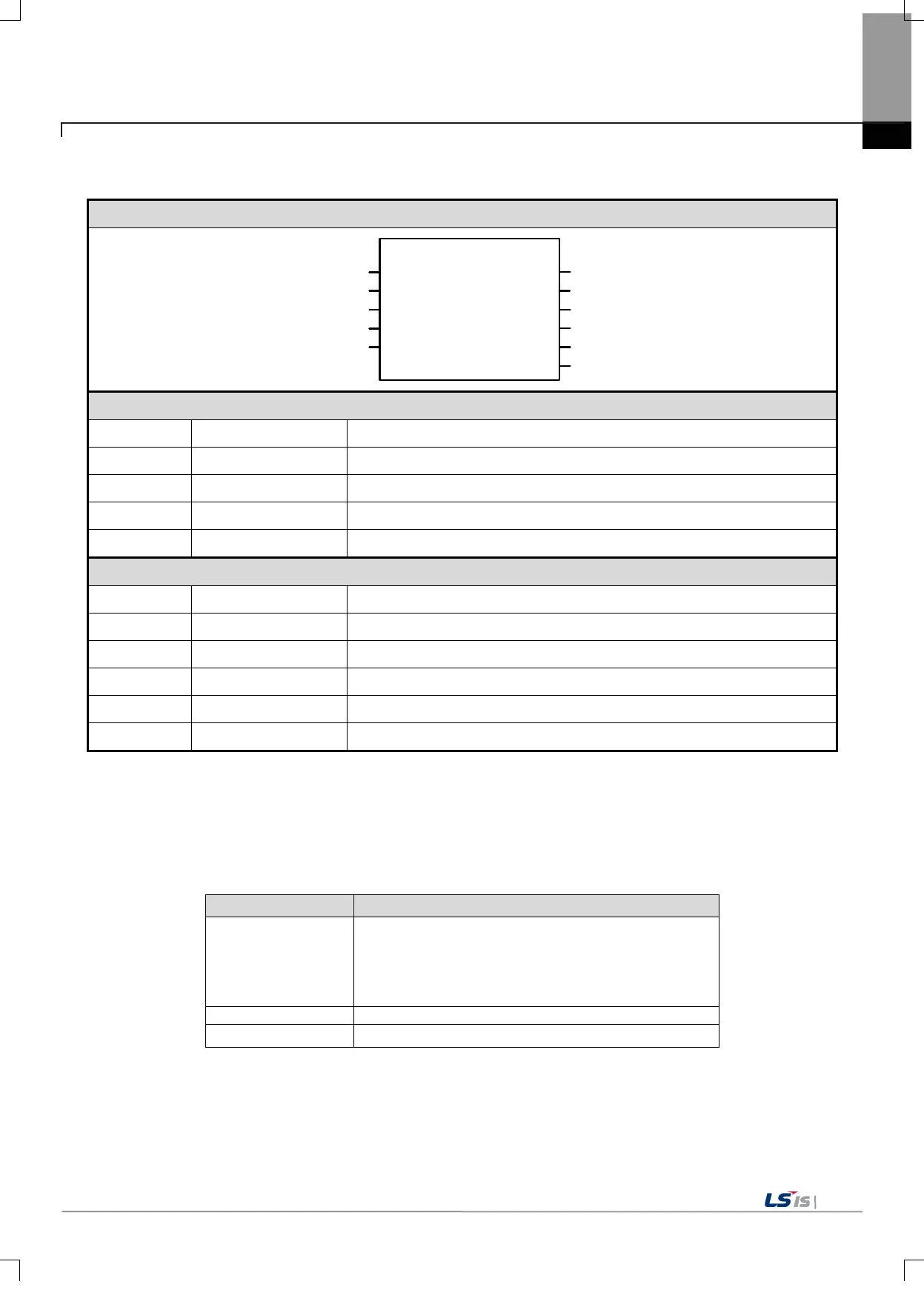
ReadEsc
Adp
Ado
Done BOOL
UINT
UINT
BOOL Execute
UINT
Length
Busy BOOL
Error BOOL
ErrorID
WORD
UINT EcatCmd Value
UDINT
Wkc UINT
Give the ESC reading command to the slave controller in the rising Edge.
Set the slave controller address according to the EcatCmd.
Set the slave controller ESC address.
Set the data length to read. (1 ~ 4 Byte)
Set the EtherCAT command. (1: APRD, 4: FPRD, 7: BRD)
This represents successful ESC reading to complete normally.
Indicate that the execution of motion function block is not completed.
Indicate whether an error occurs or not.
Output the number of error occurred while motion function block is running.
Output the ESC reading value of the slave controller
After the execution of the command, Working Counter value is displayed.
(1) This motion function block is a function block to read the data of the address in Ado set from the ESC (EtherCAT Slave
Controller) of the designated slave device.
(2) Value and Wkc(Working Counter) is displayed as 0 when the motion function block is executed. When the execution is
completed (Done output is on), the read data value is displayed at Value, and the Working Counter value is displayed at Wkc.
(3) Adp(Address position) is designating the address of the EtherCAT slave device. The following values can be set depending
on the EcatCmd setting. If EcatCmd setting is 7(BRD), Adp input value is ignored. If a value outside the range is set for Adp
input, “Error 0x0F60” occurs.
1 (APRD)
0x0000: The first slave connected
0xFFFF: The second slave connected
0xFFFE: The third slave connected
:
0xFFC1: 64th slave connected
(4) (Length can be set to between 1 and 4, which means 1-4 bytes. Setting a value outside the above range will cause "Error
0x0F61. "
(5) At EcatCmd, set the type of command to use when reading ESC (EtherCAT Slave Controller). One of the following
commands can be used: Setting a value outside the above range at EcatCmd will cause "Error 0x0F62.”

 Loading...
Loading...
