Chapter 6 Motion Function Blocks
6.4.3 Electrical gearing run (MC_GearIn)
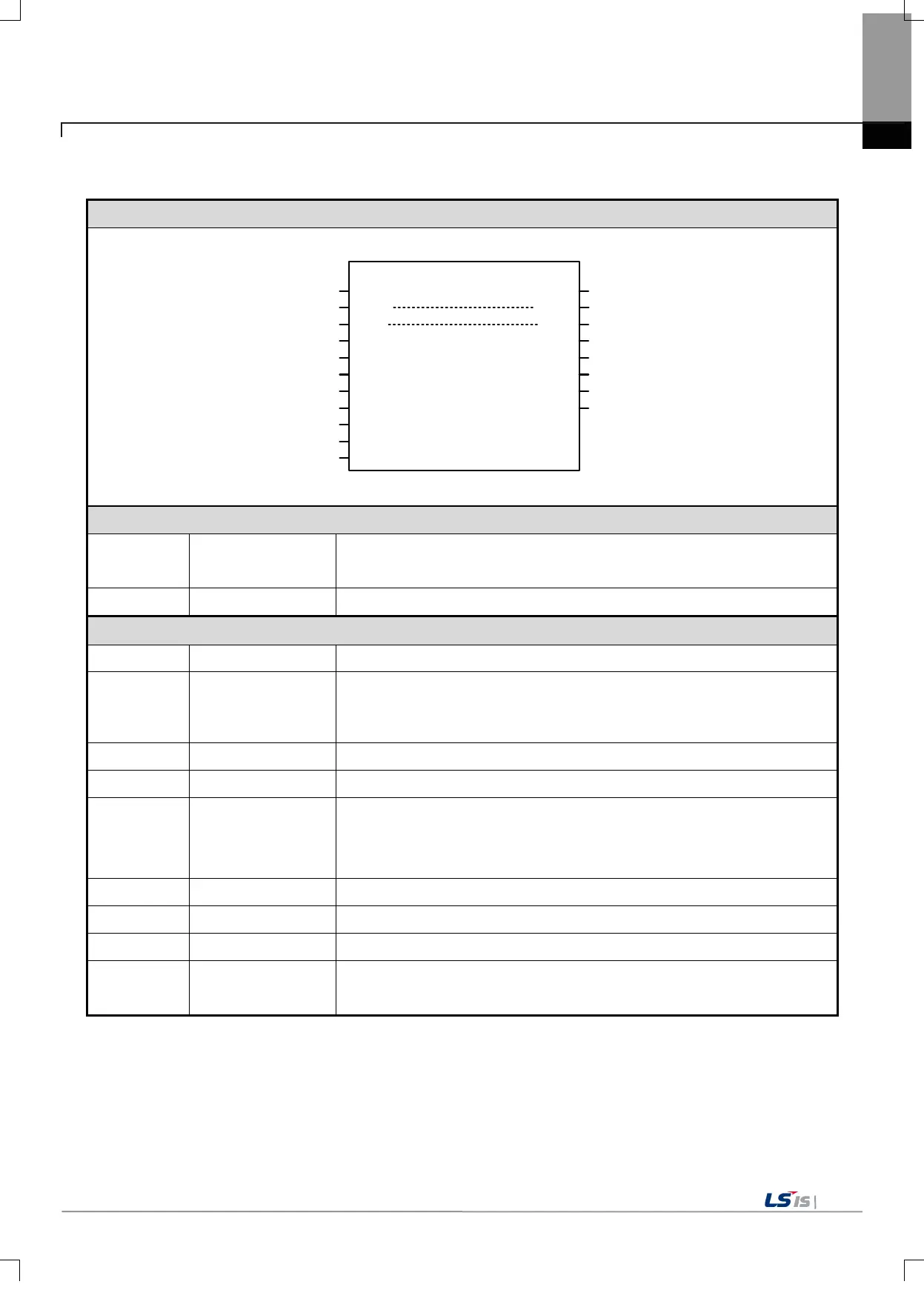
MC_GearIn
Master
Master
Slave
InGear
BOOL
UINT
UINT
UINT
BOOL Execute
BOOL ContinousUpdate Busy BOOL
CommandAborted
BOOL
Error
BOOL
ErrorID
WORD
INT RatioNumerator Active BOOL
UINT RatioDenominator
UINT MasterValueSource
LREAL Acceleration
LREAL Deceleration
LREAL Jerk
UINT BufferMode
Slave
UINT
UINT Master
Set the main axis. (1~32: real/virtual axis, 33~36: virtual axis1~32: real/virtuall
axis, 33~36: virtual axis, 1001~1002: encoder)
Set the serve axis. (1~32: real/virtual axis, 33~36: virtual axis)
Give gear operation command to the relevant axis in the rising Edge.
BOOL ContinuousUpdate
Specify the update setting of input value.
(Refer to 6.1.5.Changes in Parameters during Execution of Motion Function
Block)
Specify the numerator of gear ratio. (-32768 ~ 32767)
Specify the denominator of gear ratio. (0 ~ 65535)
UINT MasterValueSource
Select data of the main axis to be synchronized.
0: Synchronize in the command position of the main axis.
1: Synchronize in the current position of the main axis.
Specify the acceleration at the beginning of gear operation synchronization. [u/s
2
Specify the deceleration at the beginning of gear operation synchronization. [u/s
2
Specify the change rate of acceleration/deceleration. [u/s
3
UINT BufferMode
Specify the sequential operation setting of motion function block.
(Refer to 6.1.4.BufferMode)

 Loading...
Loading...
