Chapter 1 Overview
[ Example ]
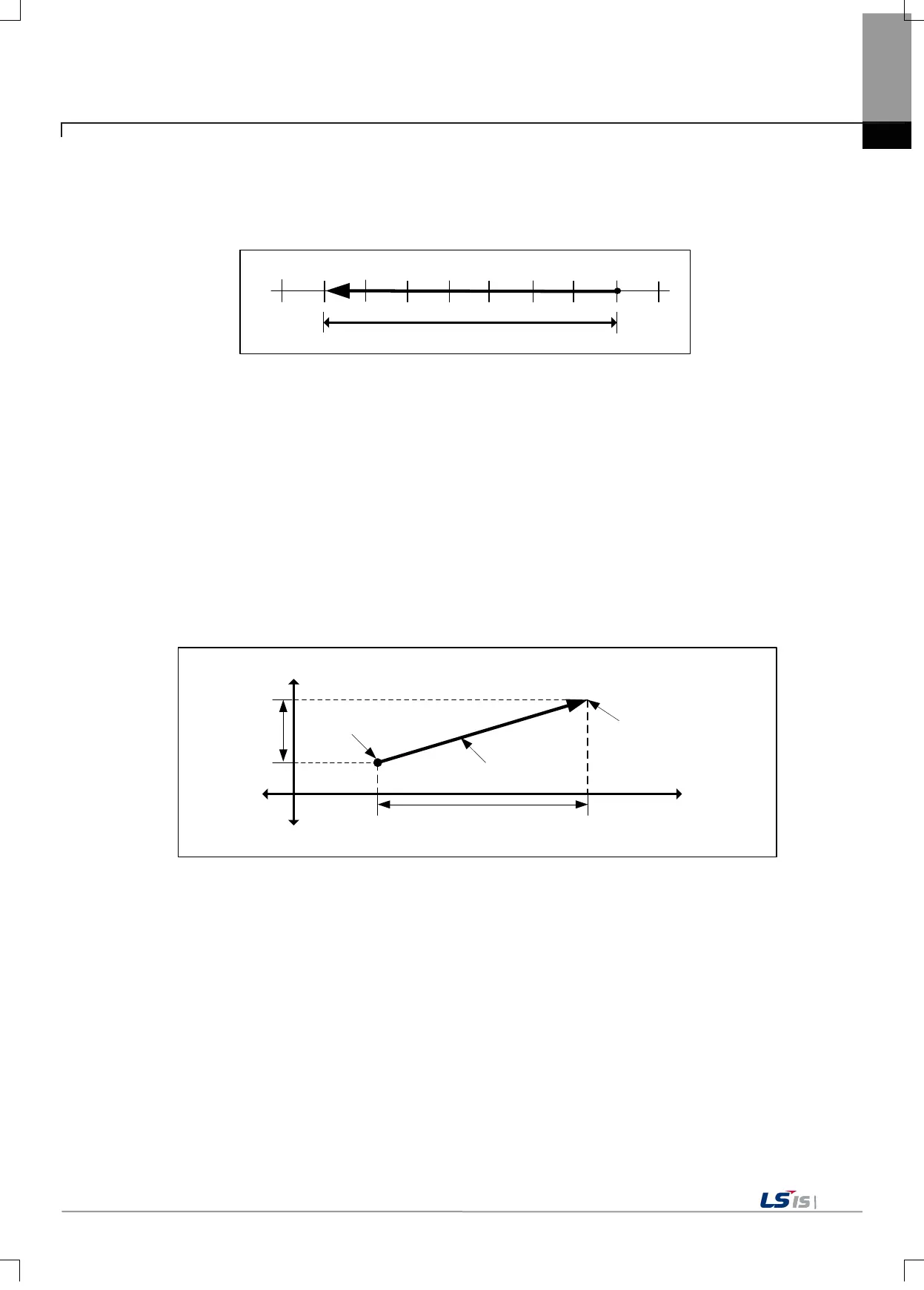
1) Starting Position : 5000
2) Goal Position : -7000
In this condition, it moves reversely and stops at -2000.
-2000
Goal Position Starting Positon
0
5000
Reverse positioning control(movement value -7000)
1.3.2 Interpolation Control
(1) Linear Interpolation Control
Execute Linear interpolation control with designated axis at start position. (Current position)
Combination of interpolation axis is unlimited and it is available to execute max. 4 axis Linear interpolation
control.
(a) Linear interpolation by absolute coordinates
1) Execute Linear interpolation from starting position to goal position designated by positioning data.
2) Positioning control is executed based on home position designated in homing.
3) Movement direction is designated by starting position & goal position of each axis.
a) Starting position < Goal position : Positioning operation with forward direction
b) Starting position > Goal position : Positioning operation with reverse direction
Y axis Forward direction
X axis
Forward
direction
Y1
Y2
X1
X2
X axis movement value
Y axis
movement
value
X axis
Reverse
direction
Y axis Reverse direction
Goal position(X2, Y2)
Starting position(X1, Y1)
Operating by linear
interpolation
[ Example ]
a) Starting Position (1000, 4000)
b) Goal Position (10000, 1000)
In this condition, operation is as follows.

 Loading...
Loading...
