Chapter 6 Motion Function Blocks
6.6.17 Write inverter speed (LS_InverterWriteVel)
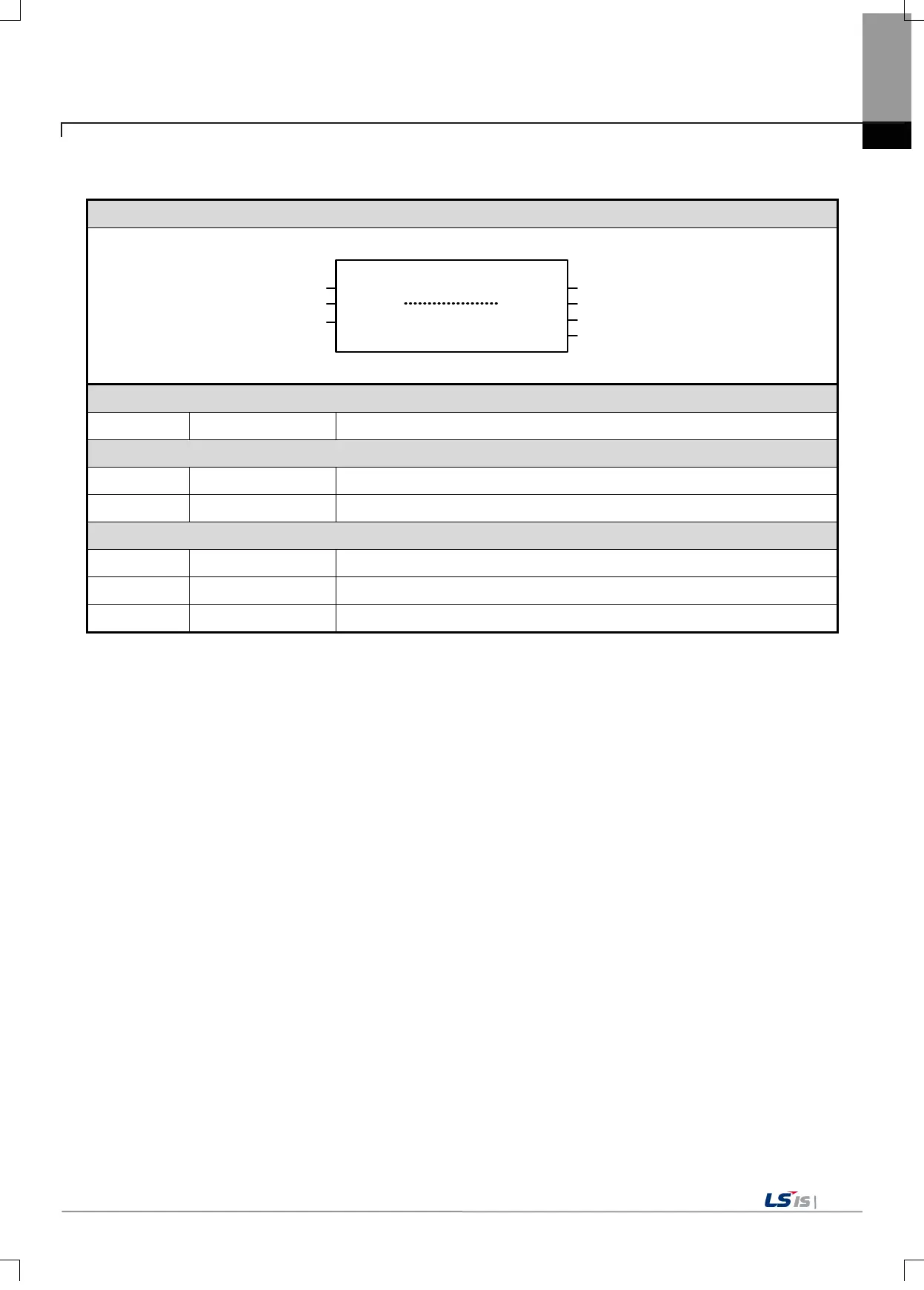
LS_InverterWriteVel
AxisAxis
Execute Done
UINTUINT
BOOL BOOL
Error BOOL
ErrorID
WORD
TargetVelINT
Specify the axis to be commanded (1~32: real axis)
Give InverterWriteVel operation command to the relevant axis in the rising Edge.
The inverter speed to be set (-30000 ~ 30000, unit: rpm)
Indicate the completion state of InverterWriteVel operation.
Indicate whether an error occurs or not.
Output the number of error occurred while motion function block is running.
(1) This motion function block is the function block that sets the speed of the inverter to operate when controlling the inverter by
the axis
(2) If you set the speed in TargetVel and execute the function block, the inverter connected to the axis will operate at the
corresponding speed.
(3) The speed value set in TargetVel is in units of rpm, and can be set to the value from -30000 to 30000.

 Loading...
Loading...
