Chapter 1 Overview
1.3 Function Overview of Motion Controller
Describe Representative functions of motion controller (Coordinate & Linear Interpolation, Circular Interpolation & Stop)
briefly.
1.3.1 Position Control
Execute positioning control for the designated axis from starting position(current position) to goal position.(the position
to move to)
(1) Control by Absolute coordinates
(a) Execute positioning control from starting position to goal position designated in motion function block.
(b) Positioning control is executed based on home position designated in homing.
(c) Moving direction is decided by starting position and goal position.
1) Starting Position < Goal Position : Forward Positioning Operation
2) Starting Position > Goal Position : Reverse Positioning Operation
[ Example ]
1) Starting Position : 1000
2) Goal Position : 8000
Value of Forward movement is 7000 (7000=8000-1000)
1000
Starting Position
Goal Position
0
8000
Movement Value 7000
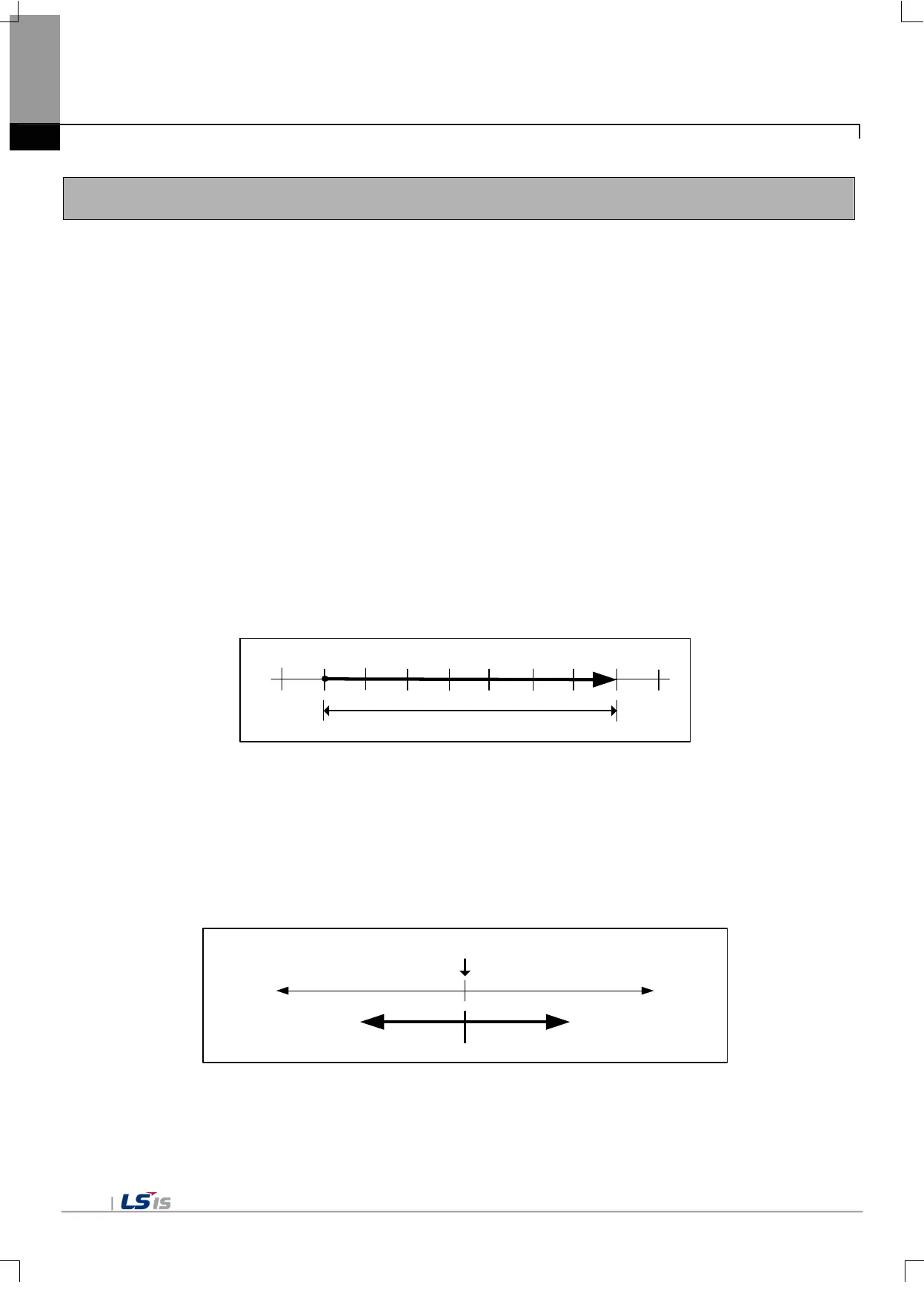
(2) Control by Incremental Coordinates
(a) Execute positioning control from starting position as much as goal movement value.
The difference from absolute coordinates control is that the goal position is movement value, not position
value.
(b) Moving direction depends on sign of movement value.
1) Positive value (+ or 0) : Positioning operation with forward direction
2) Negative value (-) : Positioning operation with reverse direction
Starting Position
Reverse
Forward
Negative value Positive value

 Loading...
Loading...
