Chapter 7 Program
7.3 Discrete Motion Program
7.3.1 Preparation for Operation
These are example programs that make access to servo drive connected with Ethernet cable and get the connected servo drive to be
On to operate EtherCAT servo drive
.
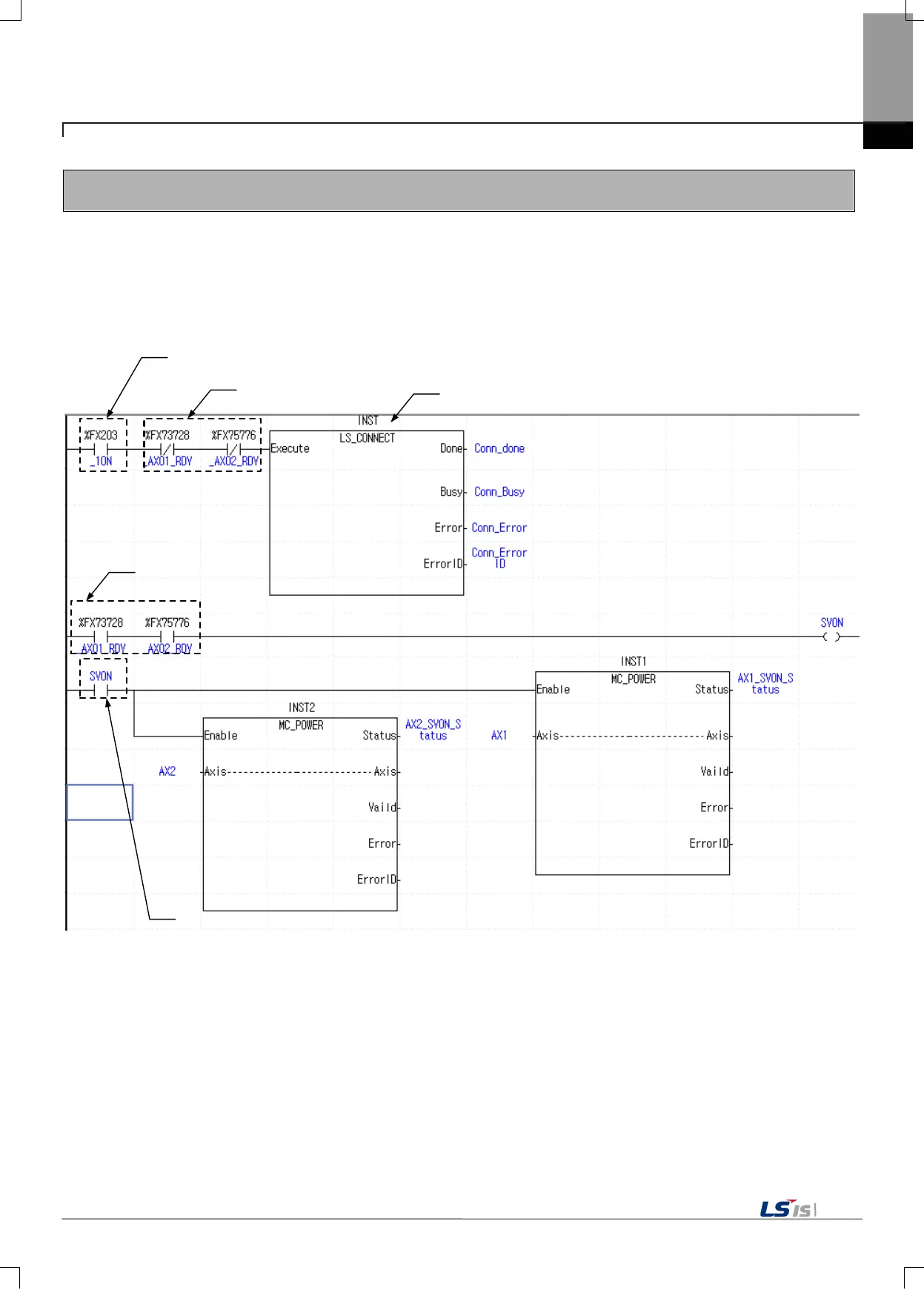
(2) 1 Scan on
(2) 1Axis/2Axis ready off
(3) Connect EtherCAT
(3) 1Axis//2Axis
ready on
(3) 1Axis/2Axis servo on
(1) The above examples assume situation in which two axes of 1-axis and 2-axis are connected to the motion control module.
(2) In case 1-axis and 2-axis are not connected when the motion control module enters the RUN, start the connection of EtherCAT
communication between motion control module and servo drive using motion function block for communication connection
(LS_CONNECT).
(3) If the connection of EtherCAT communication between motion control modules and servo drives is normally performed, servo
On/Off (MC_Power) command is issued to each axis by getting “SVON” contact to be On.
(4) In case there is no error in servo drive of the connected 1-axis and 2-axis, the servo is normally On, and it is ready to operate 1-
axis and 2-axis.

 Loading...
Loading...
