Chapter 6 Motion Function Blocks
6.7.10 JOG operation of the coordinate system (MC_RobotJog)
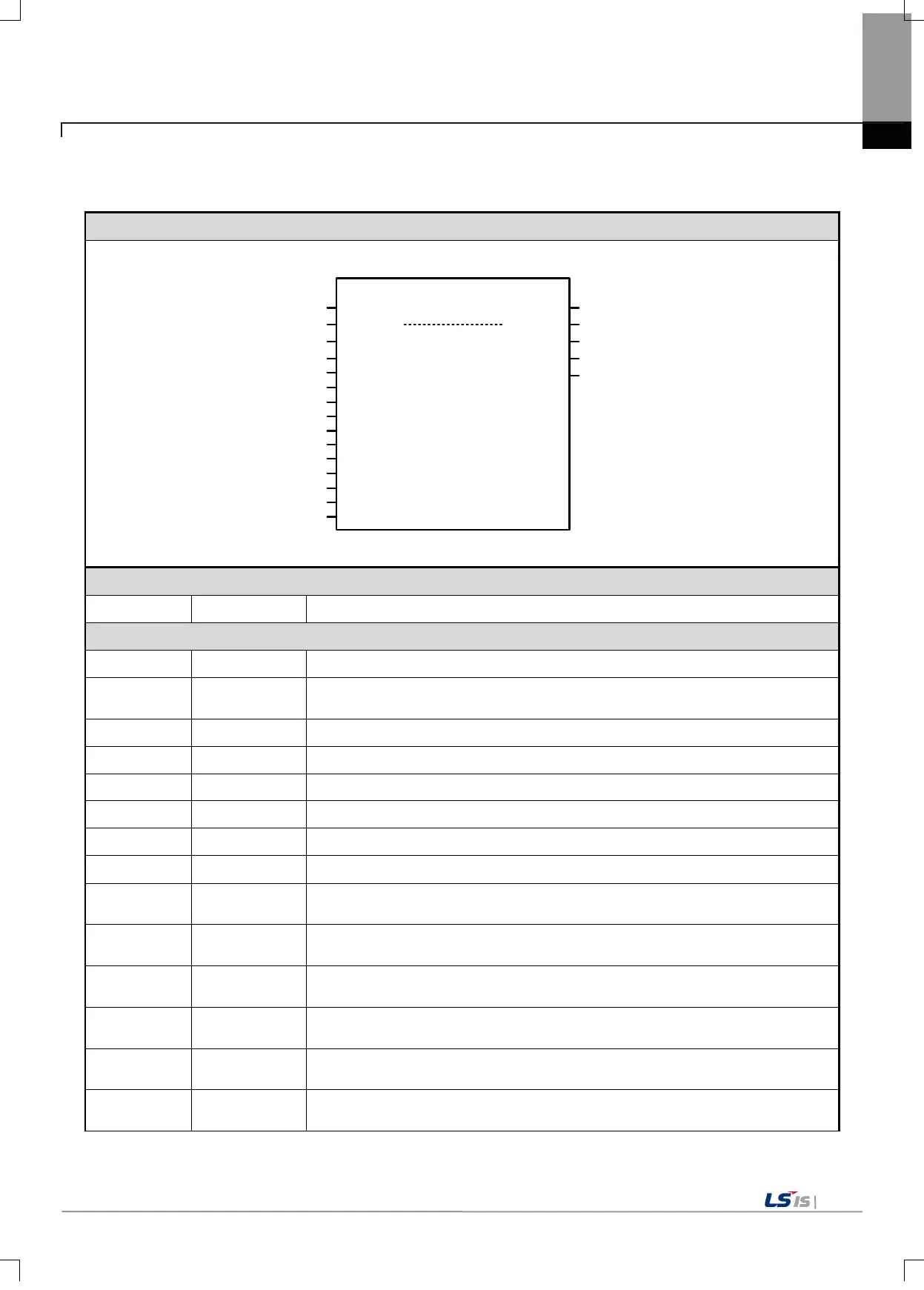
LS_RobotJog
AxesGroup
AxesGroup
Enable Enabled
UINTUINT
BOOL BOOL
BOOL Low_High Busy BOOL
Error BOOL
ErrorID WORD
BOOL Pos_X
BOOL Neg_X
BOOL Pos_Y
BOOL Neg_Y
BOOL Pos_Z
BOOL Neg_Z
BOOL Pos_A
BOOL Neg_A
BOOL Pos_B
BOOL Neg_B
BOOL Pos_C
BOOL Neg_C
Set the axis group to make the command.(1 ~ 16 : Group 1 ~ Group 16)
While the input is ON, the JOG operation command is sent to the relevant axis group.
BOOL Low_High
Set the JOG speed in JOG operation.
(0: JOG low-speed operation, 1: JOG high-speed operation)
Set the linear operation direction at JOG operation.(X-axis + direction)
Set the linear operation direction at JOG operation.(X-axis –direction)
Set the linear operation direction at JOG operation.(Y-axis + direction)
Set the linear operation direction at JOG operation.(Y-axis –direction)
Set the linear operation direction at JOG operation.(Z-axis + direction)
Set the linear operation direction at JOG operation.(Z-axis –direction)
BOOL Pos_A
Set the rotary operation direction at JOG operation.
(X-axis counter-clockwise rotation)
BOOL Neg_A
Set the rotary operation direction at JOG operation.
(X-axis clockwise rotation)
BOOL Pos_B
Set the rotary operation direction at JOG operation.
(Y-axis counter-clockwise rotation)
BOOL Neg_B
Set the rotary operation direction at JOG operation.
(Y-axis clockwise rotation)
BOOL Pos_C
Set the rotary operation direction at JOG operation.
(Z-axis counter-clockwise rotation)
BOOL Neg_C
Set the rotary operation direction at JOG operation.
(Z-axis clockwise rotation)

 Loading...
Loading...
