Chapter 4 Motion Control Operation
4.4 EtherCAT Communication
The communication of EtherCAT(Ethernet for Control Automation Technology) is explained here.
4.4.1 What is EtherCAT
EtherCAT is a high-performance industrial network system which uses Real-Time Ethernet based on the Ethernet
developed by Beckhoff Company in Germany. EhterCAT is a communication between the master and the slave, and it
provides a short communication cycle time by transmitting Ethernet Frame at a high speed between each nodes. When
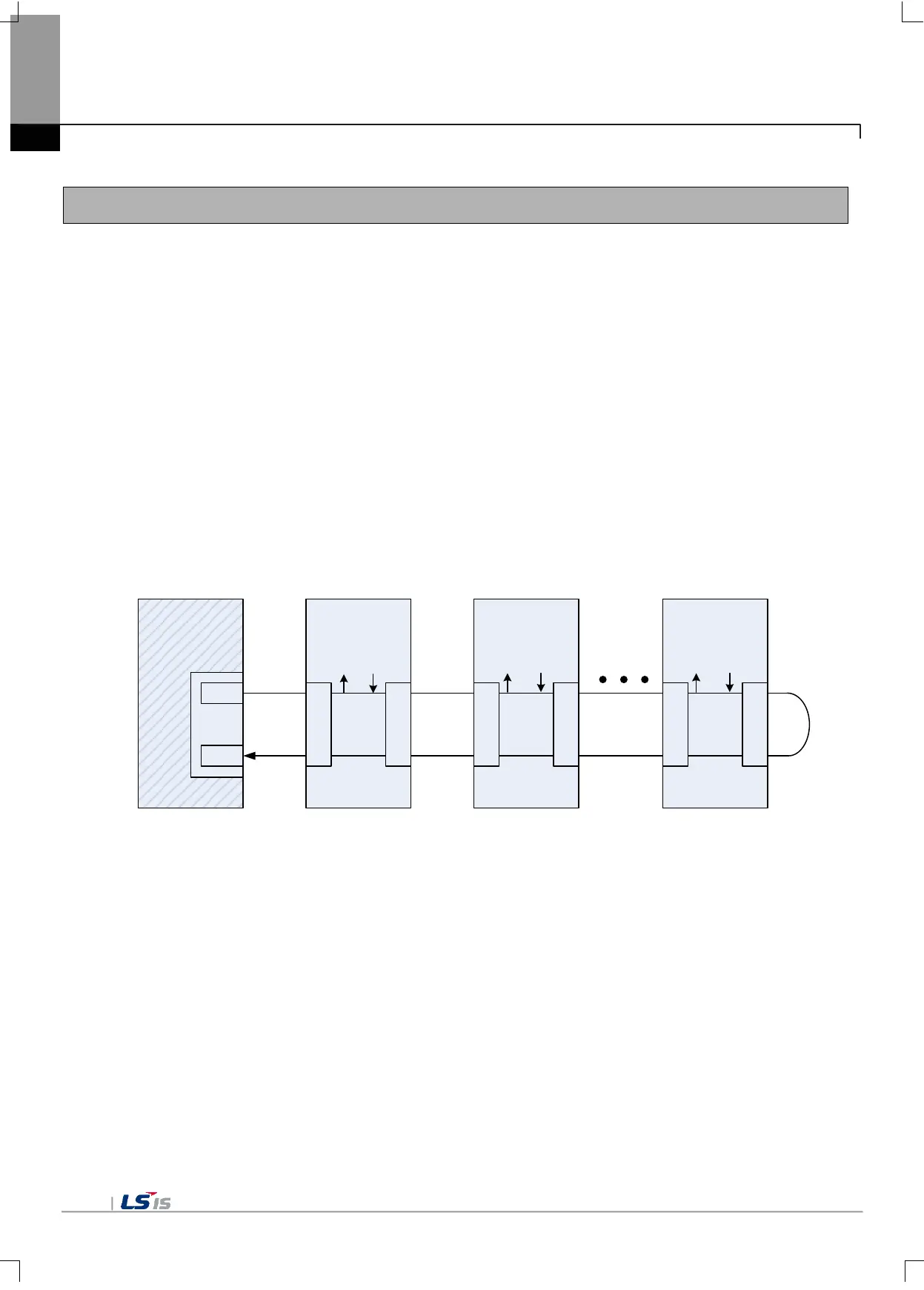
data Frame transmitted from the master to the slave passes through the slave, EtherCAT communication sends the
received data to the relevant data Frame at the same time as the slave receives the transmission data. In other words,
EtherCAT does not transmit data to each slave nodes of the network but passes one communication Frame to every
slave in order, and each slave reads and writes Data in its relevant area in the Frame when the communication Frame
passes through each slave. The communication Frame performs high speed data transmission with a structure where
after going through the last slave, it turns back and passes through every slave and is transmitted to the master.
XMC-E32A
OUT
IN
SLAVE1 SLAVE2SLAVE2 SLAVEn
IN OUT IN OUT IN OUT
Input
data
Output
data
Input
data
Output
data
Input
data
Output
data
4.4.2 CoE(CANopen over EtherCAT)
Motion controller uses the slave and EtherCAT to communicate and uses CoE(CANopen over EtherCAT) as the protocol
for information exchange.
In CoE, parameter and data information of the slave are composed of Object Dictionary. Object Dictionary contains the
information used in the configuration of the device and communication, and it is a group of the object (parameter) which
can be accessed through the network. In the communication between master-slave using CoE, there are a
communication which uses Process Data Object (PDO) and synchronously transmits information, and a Service Data
Object (SDO) communication which occurs asynchronously.
Motion controller regularly performs process data communication to receive and send input/output signal and to control
the position of EtherCAT slave (servo drive). It also performs service data communication in terms of an error state in
the slave and the parameter reading/writing whenever there is a request.

 Loading...
Loading...
