Chapter 4 Motion Control Operation
Process Data Communication
(PDO Communication)
servo drive position control data, input/output
of data, etc.
Service Data Communication
(SDO Communication)
servo parameter reading/writing, servo error
information reading, etc.
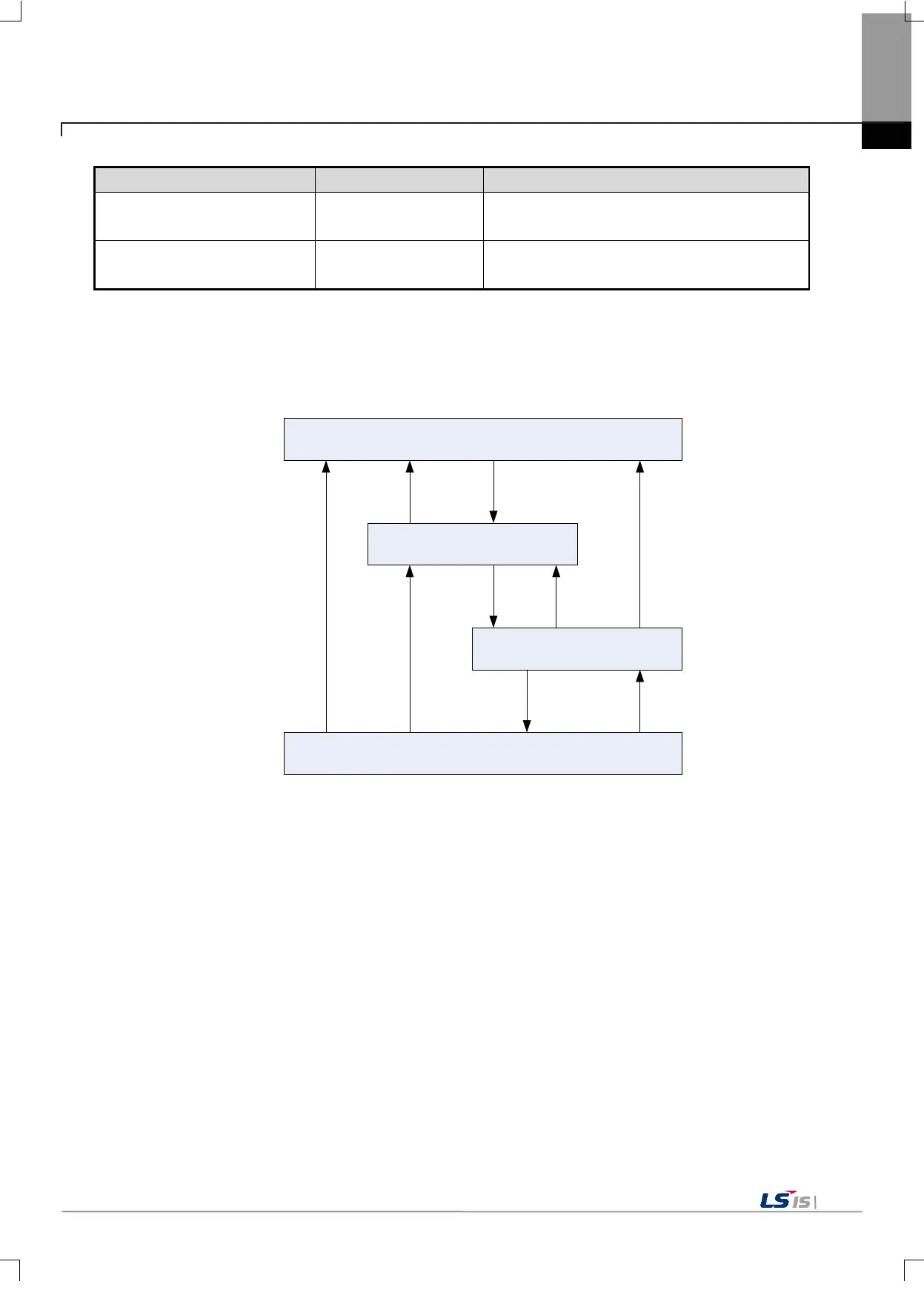
4.4.3 EtherCAT State Machine
The state and motion between states of EtherCAT communication are shown in the figure below.
Init
Pre-Operational
Safe-Operational
Operational
(OI)
(OP)
(PI) (IP)
(PS) (SP)
(SO) (OS)
(SI)
The communication between the master-slave of EtherCAT communication begins from the Initial state and
progresses to the Operational state. In the motion controller, the slave servo drive can be controlled with a normal
process data communication when it is in operational state.
If a communication error occurs while the motion controller performs the slave and EhterCAT communication at
operational state, the communication state is changed to the Initial state and the communication between the
slaves is discontinued. In this case, the factor of communication error should be removed and reconnect with the
slave to restart the communication.

 Loading...
Loading...
