Chapter 6 Motion Function Blocks
6.5.6 Performs the search home of all axes in the group (MC_GroupHome)
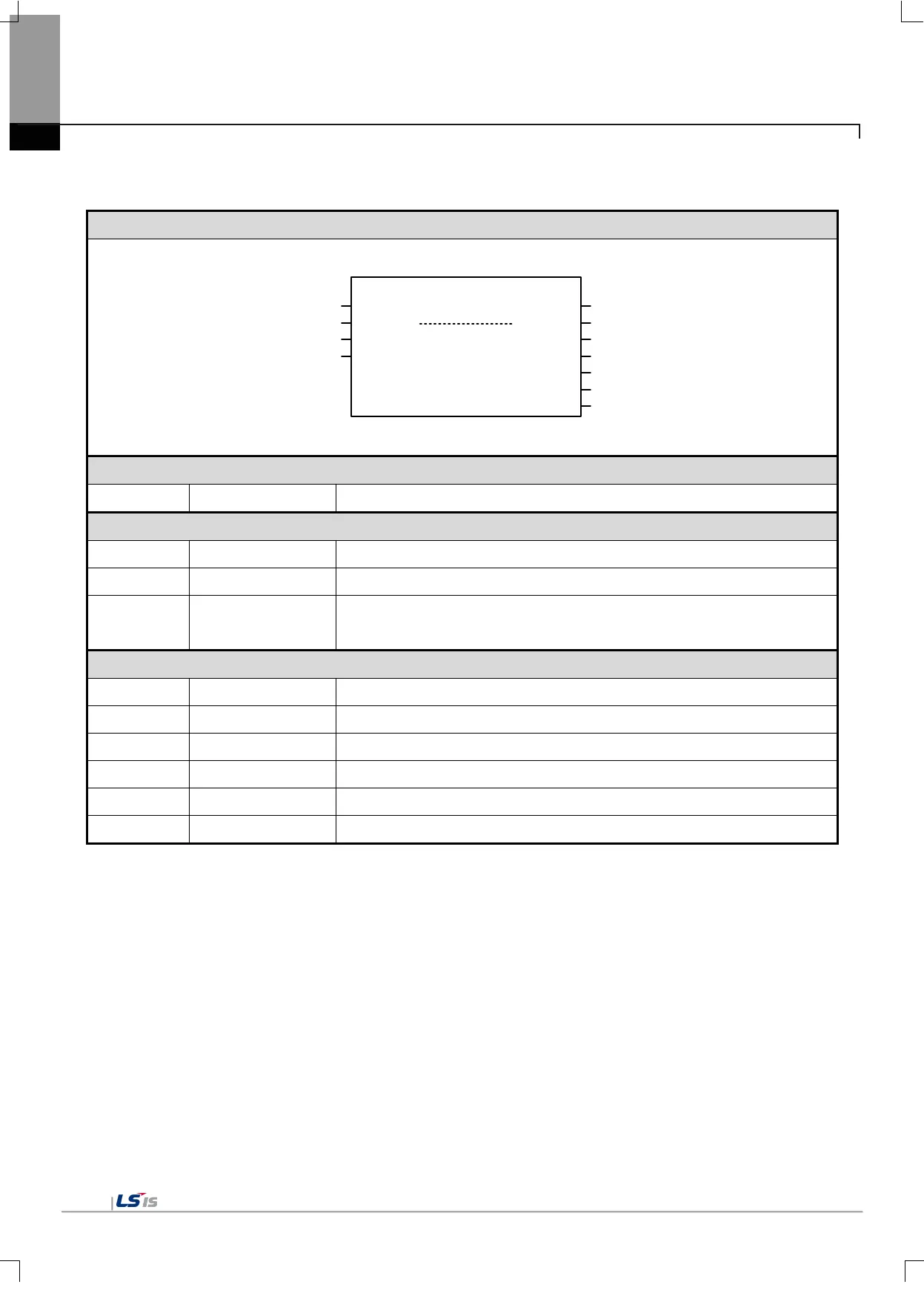
MC
_GroupHome
DoneExecute
AxesGroup AxesGroup
BOOL
BOOL
UINT
UINT
LREAL[ ]
Position
UINT BufferMode
Busy
BOOL
CommandAborted
BOOL
Error
BOOL
ErrorID
WORD
Active
BOOL
Set the group returning to home. (1 ~ 16 : Group 1 ~ Group 16)
Give group homing command to the relevant group in the rising Edge.
Specify the absolute position of each axis when reference signal is detected.
UINT BufferMode
Specify the sequential operation setting of motion function block.
(Refer to 6.1.4.BufferMode)
Indicate the state of motion function block completion.
Indicate that the execution of motion function block is not completed.
Indicate that the current motion function block is controlling the relevant axis.
Indicate that the current motion function block is interrupted while it is running.
Indicate whether an error occurs or not.
Output the number of error occurred while motion function block is running.
(1) This motion function block is to give homing command to the axis group specified in AxesGroup input.
(2) Homing method is operated as specified in servo parameter of the relevant axis in advance.
(3) In Position input, specify the absolute position to the array to be set when homing is completed or Reference Signal is
detected. Values in the array and the axis in the group correspond in the order of [①, ②, … ⑨, ⑩]. (①~⑩ are the axis ID
in the axis group)
(4) The axis group is in 'GroupHoming' state while this motion function block is running, and it is switched to 'GroupStandby'
state when motion function block is completed.

 Loading...
Loading...
