Chapter 8 Motion Control Function
3. Change to the origin indetermination status
The absolute position control operation cannot be performed since motion control module becomes the origin indetermination
status in the following cases.
(1) In case of re-connection after servo drive power off when using an incremental encoder
(2) In case of re-connection after PLC power off/on when using an incremental encoder
(3) In case homing is not normally completed after the execution of homing command
In case of the origin indetermination status as above, the origin determination should be executed for absolute coordinate
position control operation.
8.1.2 Homing
1. Operation
Homing is performed to establish the origin of the machine after the power is applied. Before performing the homing,
parameters related to the homing of servo drive must be set in each axis. When the origin position is determined by homing,
the origin detection signal is not recognized during the motion control operation.
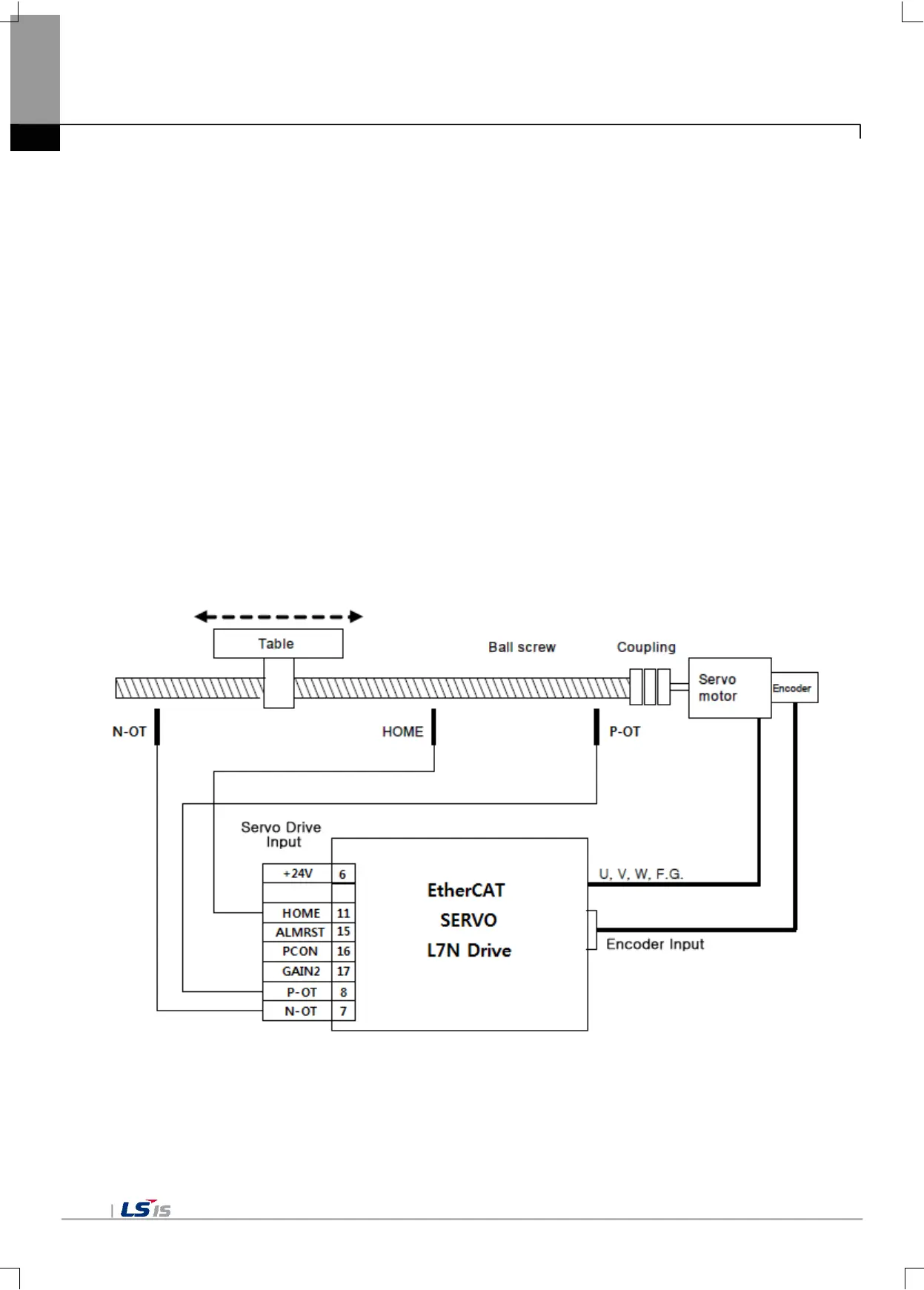
The contact performed at the time of homing is entered through connector of servo drive (EtherCAT CoE support servo drive).
Typical wiring is as follows.
For the performance of homing, a method suitable for the system of users for homing operation mode (EtherCAT CoE support
drives: Refer to instruction manual for the relevant drive) should be selected.
In motion control module, actual operation after starting homing is performed in servo drive, and homing method to support
complies with servo drive. Before setting the homing, homing-related parameters are to be set in servo parameters of the
axis.

 Loading...
Loading...
