Chapter 8 Motion Control Function
8.2.11 Synchronous Control
1. Gear operation
(1) Gear operation makes speed synchronization of main axis (or encoder) and serve axis depending on the set ratio.
(2) Gear operation can be aborted with gear operation cancellation command.
(3) Gear ratio (=velocity synchronization ratio) is calculated as follows.
Gear ratio = Main axis ratio/Serve axis ratio
※ Main axis ratio < serve axis ratio can also be set.
(4) Rotation direction of serve axis is based on the forward direction of the main axis. In case gear ratio is positive (>0),
rotation is made in forward direction, and that is negative (< 0), in reverse direction.
(5) The final operating velocity of serve axis is calculated as follows.
Operation speed of serve axis
= Operation speed of main axis X Gear ratio
= Operation speed of main axis X Main axis ratio/Serve axis ratio
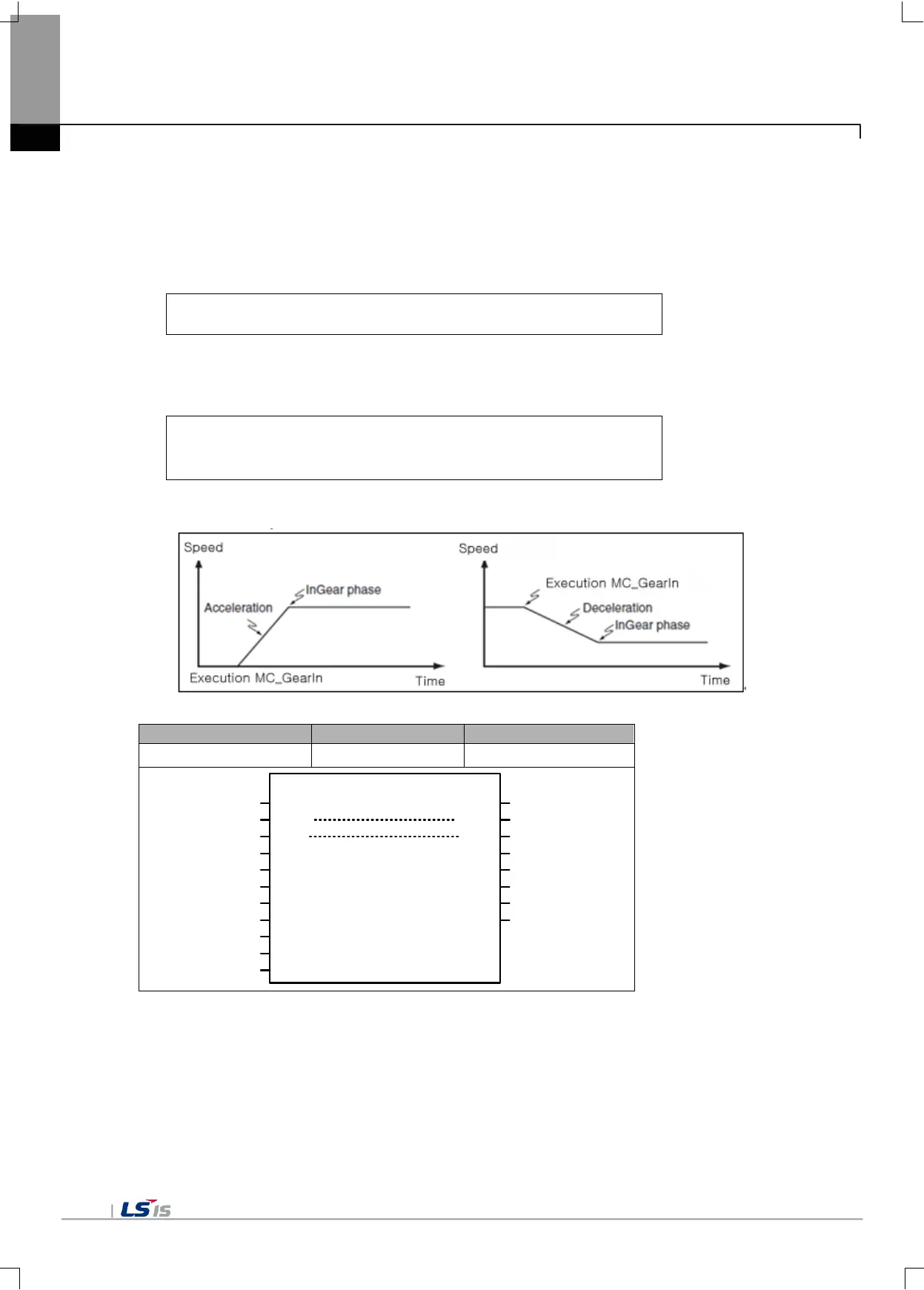
(6) Acceleration/deceleration from the start of gear operation to target velocity can be set by using Acceleration and
Deceleration input.
(7) Relevant motion function block
MC_GearIn
MasterMaster
Slave
InGear BOOL
UINT
UINT
UINT
BOOL Execute
BOOL ContinousUpdate Busy BOOL
CommandAborted BOOL
Error BOOL
ErrorID WORD
INT RatioNumerator Active BOOL
UINT RatioDenominator
UINT MasterValueSource
LREAL Acceleration
LREAL Deceleration
LREAL Jerk
UINT BufferMode
Slave
UINT

 Loading...
Loading...
