Chapter 4 Motion Control Operation
Motion controller can control up to 32 axes of actual motor axis and 4 virtual axes through EtherCAT. Among 32 axes,
you can control the axes that are not connected to the slave by setting them as virtual axes and 4 axes are provided for
the virtual axes only. In addition to the built-in 8-point input and 16-point output, up to 64 EtherCAT I/O(including the axes)
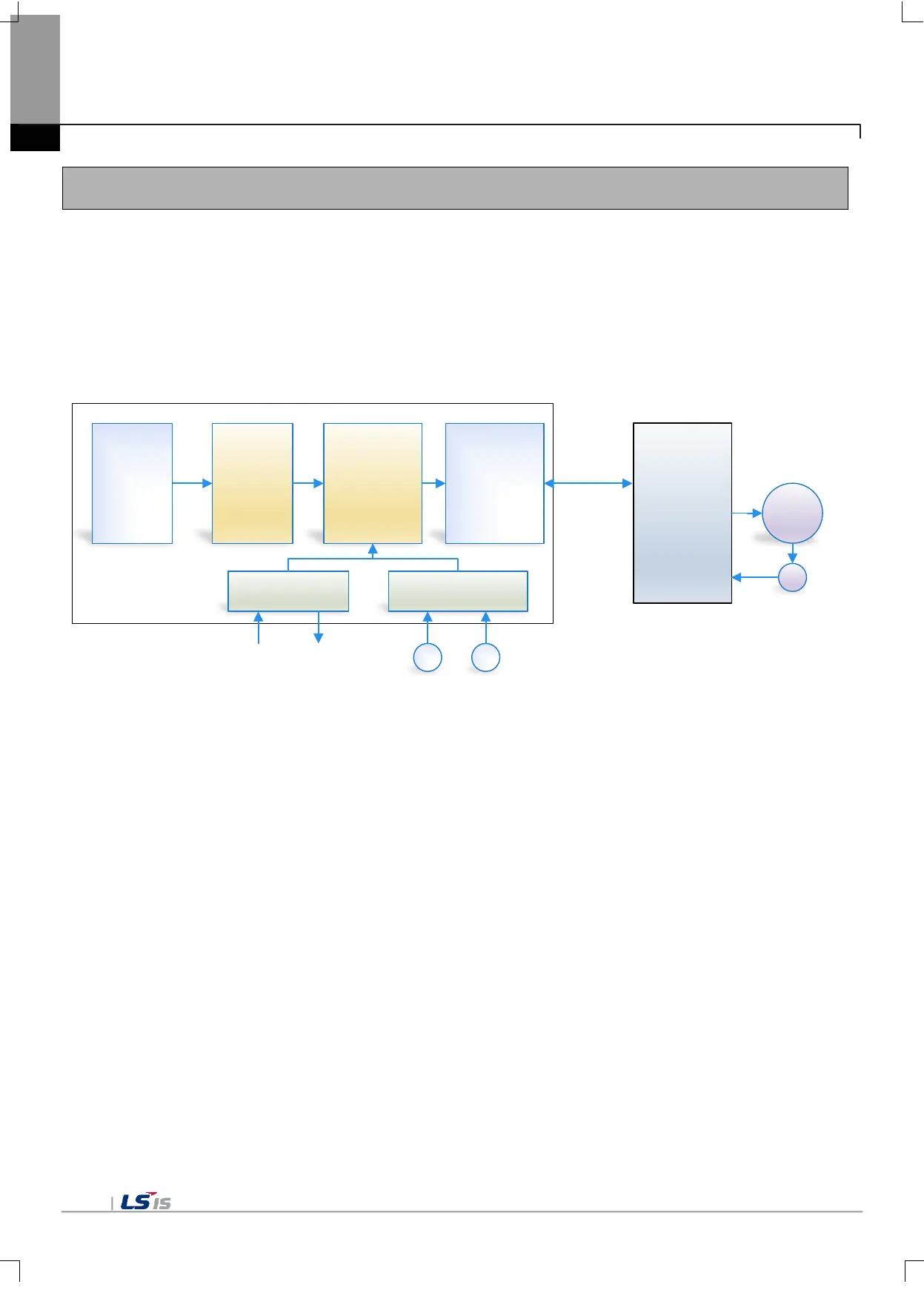
can be controlled. Motion control block diagram of motion controller is shown below.
Motion
command
analysis
Motion control
and
data process
Communication
process
Feedback
control
(Position/
Velocity/
Torque)
M
XMC-E32A
Servo drive
EtherCAT
Comm.
E
External input/output
Encoder1, Encoder2
input
E
Program
execution
E
4.2 Configuration of Motion Control

 Loading...
Loading...
