Chapter 6 Motion Function Blocks
6.6.22 Speed control operation (CSV mode) (LS_SyncMoveVelocity)
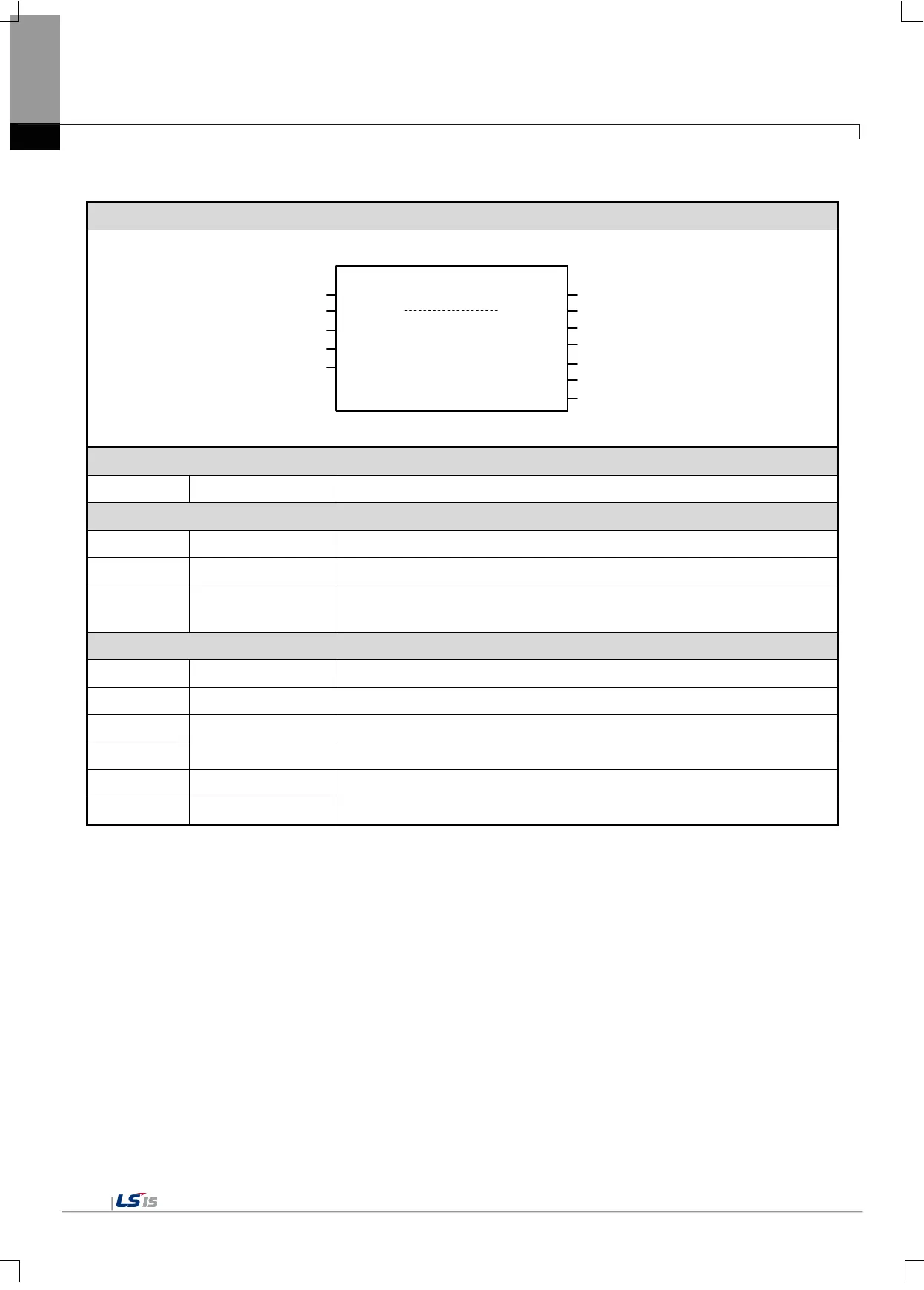
LS_SyncMoveVelocity
AxisAxis
Execute InVelocity
UINTUINT
BOOL BOOL
Busy BOOL
Active BOOL
VelocityLREAL
CmdPosModeBOOL
BufferModeUINT
CommandAborted BOOL
Error BOOL
ErrorID WORD
Specify the axis to be commanded (1~32: real axis)
In the rising Edge, it performs speed control operation through the CSV mode.
0: Apply the current position to the command position.
UINT BufferMode
Specify the sequential operation setting of motion function block.
(0: Aboritng, 1: Buffered, Refer to 6.1.4.BufferMode)
Indicate whether to reach the specified distance.
Indicate that the execution of motion function block is not completed.
Indicate that the current motion function block is controlling the relevant axis.
Indicate that the current motion function block is interrupted while it is running.
Indicate whether an error occurs or not.
Output the number of error occurred while motion function block is running.
(1) This motion function block is the function block that allows speed control using the CSV (Cyclic Synchronous Velocity) mode
of CiA402 profile on the set axis.
(2) In order to stop the specified speed operation, you can make a stop command or execute another motion function block.
(3) Velocity input specifies the speed to operate. When the sign of the operation speed value is positive (+ or no sign), it moves
in the forward direction and when it is negative (-), it moves in the reverse direction.
(4) CmdPosMode is used to set the update methods of the current position at the time of command. Only the initial value of 0 is
available and the current position of the command is updated using the feedback current position.
(5) The output InVelocity is turned on when the axis reaches the specified speed, and it is turned off when the specified speed
operation is stopped.
(6) When this Motion Function Block is running, the axis status is 'Continuous Motion'.

 Loading...
Loading...
