Chapter 8 Motion Control Function
8.2.12 Manual Control
1. Jog operation
(1) Jog operation makes positioning control by manual jog commands of users.
(2) Jog operation is possible even in the state in which the origin of the axis is not determined.
(3) Jog commands are executed even in the origin determined or undetermined status, which makes it possible to monitor
changes in position values of the axis.
(4) Acceleration/deceleration processing and jog speed
For processing acceleration and deceleration, acceleration and deceleration control is made based on the value set in Jog
Acceleration/Deceleration/Jerk among [Operation parameter – expansion parameter] setting items.
Jog speed is set in Jog high-speed and Jog low-speed among [Operation parameter – expansion parameter] setting items.
(5) Jog high-speed should be set to at the speed limit or less or at least Jog low-speed among [Operation parameter – basic
parameter] setting items.
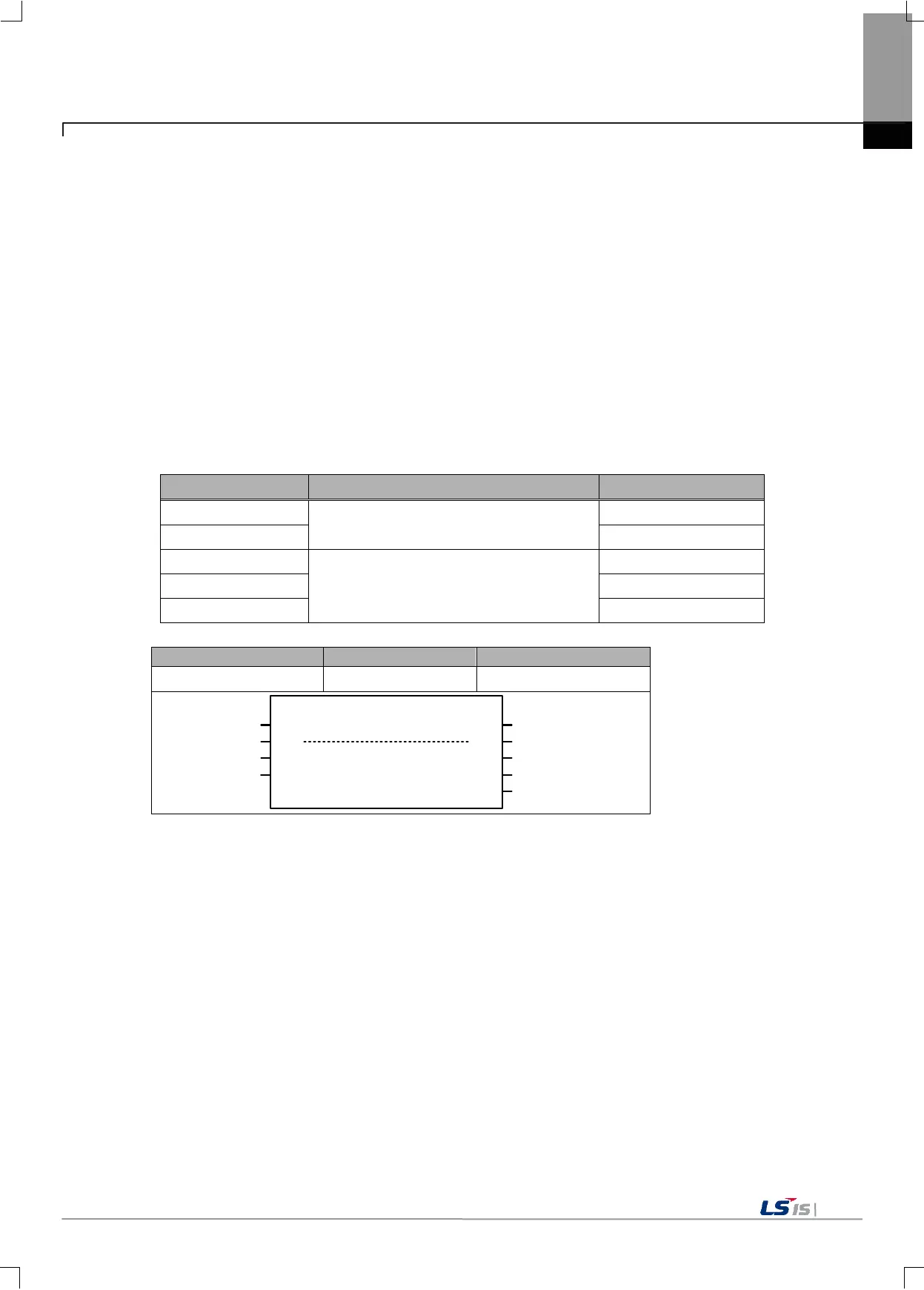
(6) Parameter setting
Long Real(LREAL) Positive number
0 or Long Real(LREAL) Positive number
(7) Motion function block
LS_Jog
Axis
Axis
Enable Enabled
UINTUINT
BOOL BOOL
BOOL Direction Busy BOOL
Error BOOL
ErrorID WORD
BOOL Low/High

 Loading...
Loading...
