Chapter 6 Motion Function Blocks
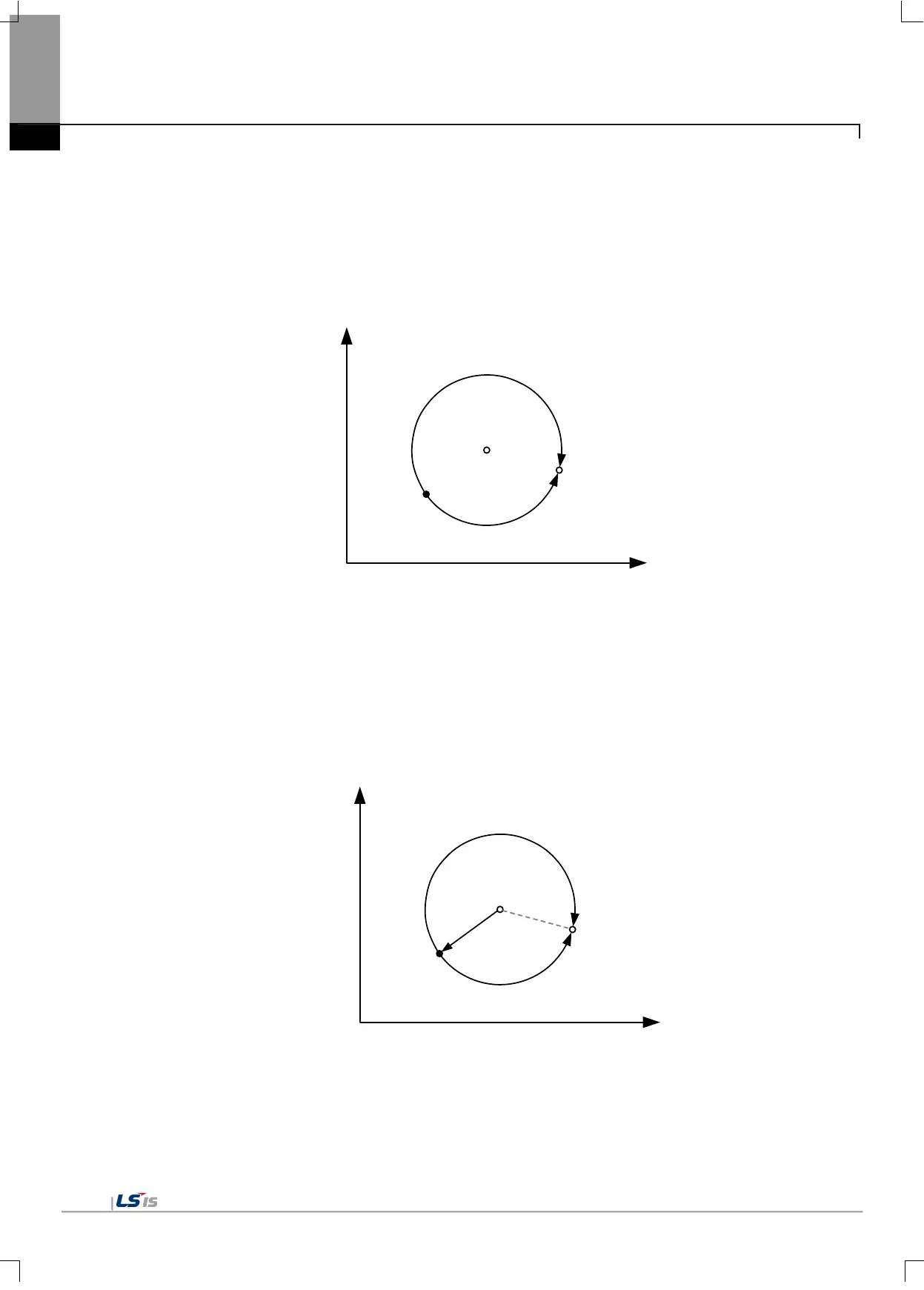
(b) Circular Interpolation Using Center Point Specification (CircMode = 1)
This method performs circular interpolation to the target position by starting operation at the current position, and
following a circular trajectory of which diameter corresponds to the distance to the designated center point. In the figure
below, the current position corresponds to the axes group coordinate at the start of the command, the center point
corresponds to the coordinate input for the AuxPoint, and the target position corresponds to the absolute coordinate
input for the EndPoint.
EndPoint
AuxPoint
CurrentPoint
X axis
Y
axis
(c) Circular Interpolation using Radius Speciation (CircMode = 2)
This method performs circular interpolation to the target position by starting operation at the current position, and
following a circular trajectory with a designated radius from the current position to the target position. In the figure below,
the current position corresponds to the axes group coordinate at the start of the command, the radius corresponds to
the X coordinate input for the AuxPoint, and the target position corresponds to the absolute coordinate input for the
EndPoint.
EndPoint
Radius
(AuxPoint)
CurrentPoint
X axis
Y
axis
(6) Refer to chapter 8.4.7 circular interpolation control in motion controller’s manual for more details.
(7) The changed parameters are applied by re-executing the function block (Execute input is On) before the command is
completed. Only, Velocity, Acceleration, Deceleration, Jerk, AuxPoint, Endpoint input can be updated.
(8) Velocity input can be set to 0 or changed.

 Loading...
Loading...
