ID 442426.04 308WE KEEP THINGS MOVING
Optimize
15
Manual SD6
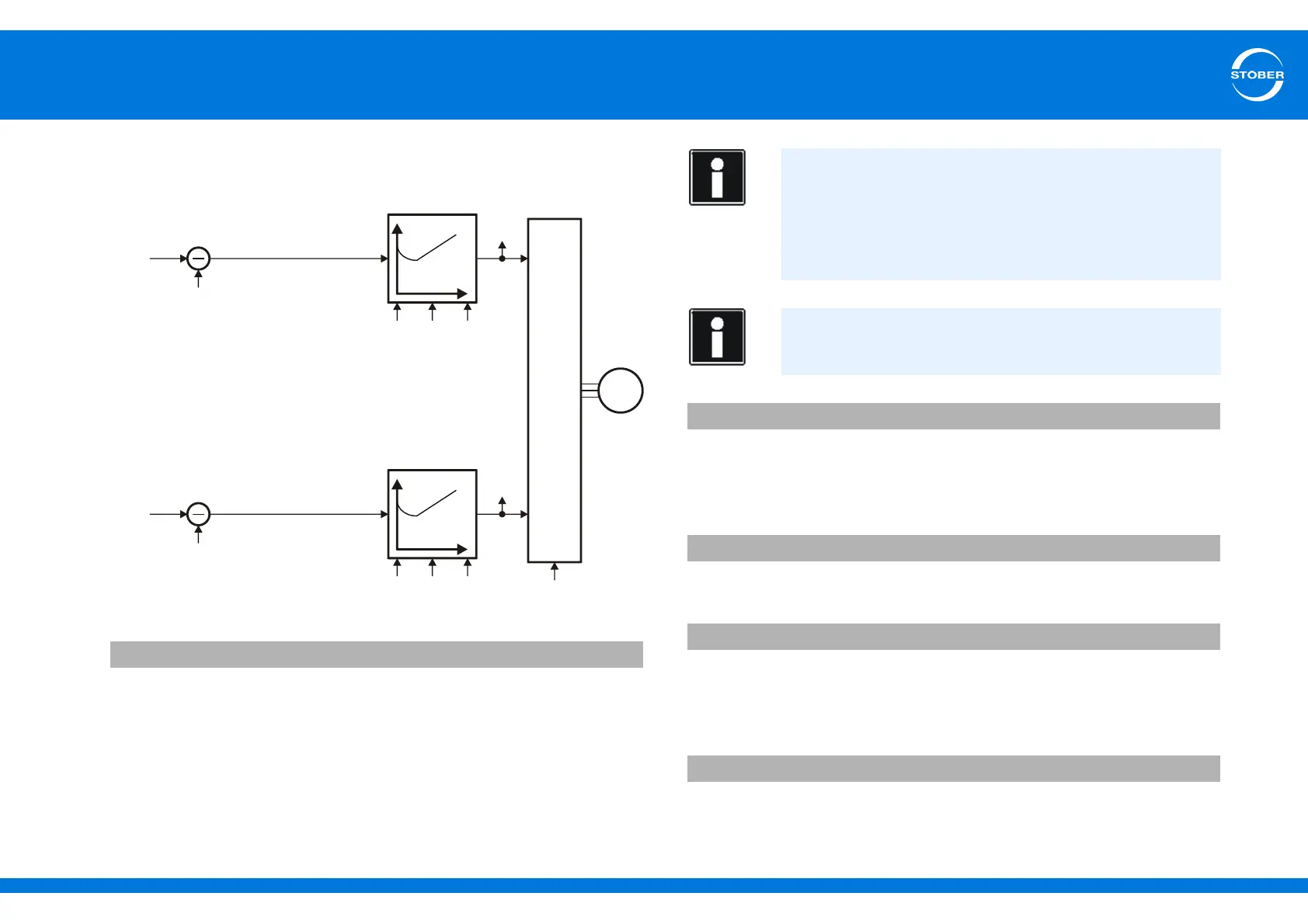
15.1.1.4 Current controller
15.1.1.4.1 B59 = 0: Inactive
Changing the clock frequency affects the amount of noise produced by the
drive. However, increasing the clock frequency results in increased losses.
Because of this, the admissible nominal motor current (B12) must be reduced
at increased clock frequency. In some operating states the clock frequency is
changed by the drive controller itself. The currently active clock frequency is
displayed in E151.
Action time of the current controller for the torque/ force-generating part in ms.
A setting below 0.3 ms will result in an integral gain of 0 (equivalent to an infinite
action time).
Proportional gain of the torque/ force controller.
Action time of the current controller for the flow generating part in ms. A setting
below 0.3 ms will result in an integral gain of 0 (equivalent to an infinite action
time).
Proportional gain of the flow controller.
B24 switching frequency version 0
E165
E92
PID controller
B64 B65 B68
E98
PWM
B24
M
E166
E93
PID controller
B66 B67 B68
E99
Information
The factory setting of this parameter depends on B20. When
64:SSM - vector control is selected, a value of 8:8kHz is entered
in B24. If an asynchronous machine is used (ASM - V/f-control,
ASM - V/f-slip compensated, ASM - sensorless vector control or
ASM - vector control), a value of 4:4kHz is assigned to B24.
Information
Note that if B20 = 64:SSM - vector control then you should set
B24 = 8:8kHz for better controller performance.
B64 integral time torque/force controller version 0
B65 proportional gain torque/force controller version 0
B66 integral time Id version 0
B67 proportional gain flux version 0