Chapter 6 Motion Function Blocks
Error
This is an output to indicate an error occurs while running motion function block.
If an error which cannot be automatically restored occurs while motion function block is in
operation, Error output is On, Busy & Valid output is Off (Figure d state), and motion function
block stops operating.
Error output is Off when Enable input is Off (Figure e state).
If an error which can be automatically restored occurs while function block is in operation,
Error output is On and Valid input is Off (Figure f state).
When the error in the relevant motion function block is restored, Error output is Off, and
operation is resumed (Figure g state).
ErrorID
This outputs error code regarding the relevant error when an error occurs while running
motion function block. ErrorID output and elimination time are same with Error output.
※
Valid and Error outputs are not On at the same time.
Note
1. Axis input
Each motion function block can be specified by Axis input to the axis which is subject to the relevant command. Motion controller
can control 1~32 real/virtual axes and 33~36 virtual axes, and 1001~1002 encoders can be used as main axis depending on
motion function block. Therefore, values of 1~32, 33~36, and 1001~1002 can be input in Axis input depending on motion function
block. When it is out of the range which is available to set in each motion function block, "error 0x0006”occurs.
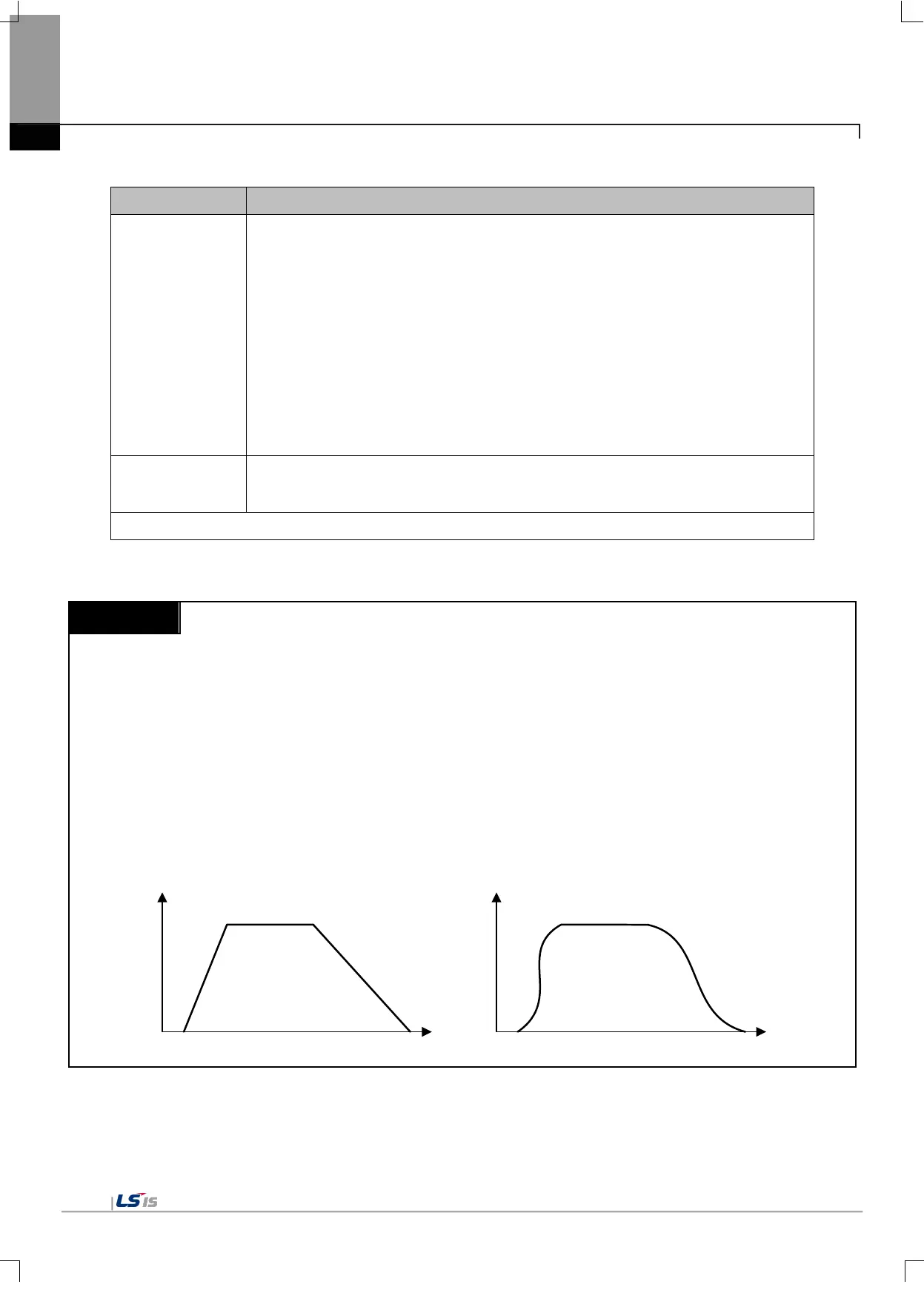
2. Jerk
If Jerk is set to a non-zero value, the speed profile becomes S-shaped, which can reduce the impact of the machine during
acceleration / deceleration. If Jerk value is set larger, acceleration / deceleration is performed close to the straight line. If Jerk value
is set to 0, acceleration / deceleration operation speed profile becomes linear.
speed
Time
speed
Time
Acc/Dec. Section is Sin Curve
< Jerk Acceleration / Deceleration >
< Jerk = 0 >
Acc/Dec. Section is linear

 Loading...
Loading...
