Chapter 6 Motion Function Blocks
0x1017” occurs in case of excess of the range.
(3) On condition that there is no motion function block is on standby after the current motion function block, If the speed is 0 after
reaching the target point, operation is completed and Done output is On.
(4) The axis is in 'DiscreteMotion' state while this motion function block is running, and it is switched to 'Standstill' state when
operation is completed.
(5) The changed parameters can be applied by re-executing the function block (Execute input is On) before the command is
completed. Only Position, Velocity, Acceleration, Deceleration, Jerk, Direction input can be updated.
(6) Velocity input can be set to 0 or changed.
(7) During the deceleration operation, even if the Velocity and Acceleration inputs are changed by using the ContinuousUpdate
function or the command re-execution function, the deceleration operation is not affected and the previous deceleration
operation continues.
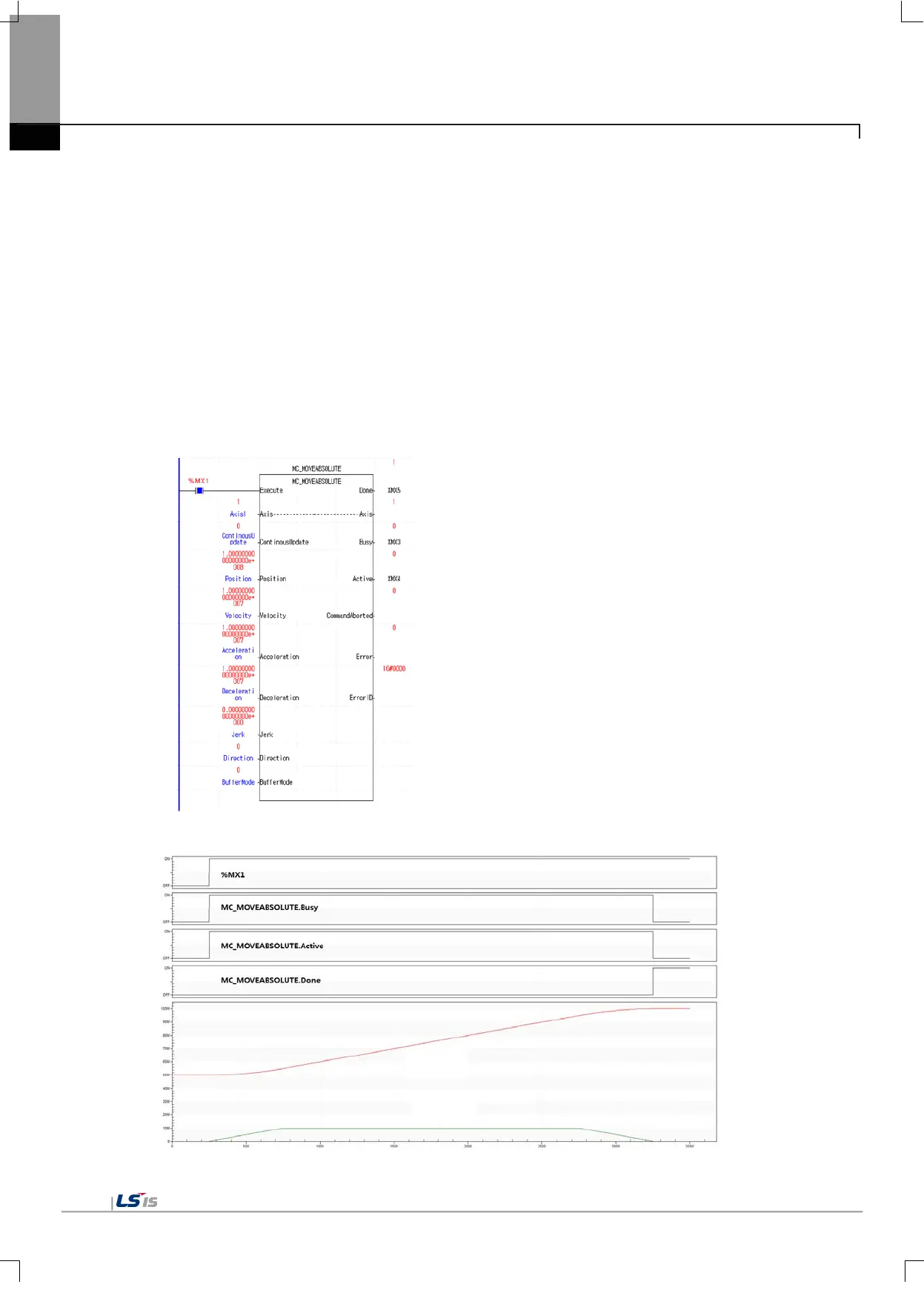
(8) Example program
This example shows the movement from the current command position of 50,000,000 to the 100,000,000 position.
(a) Function block setting
(b) Timing diagram

 Loading...
Loading...
