Chapter 8 Motion Control Function
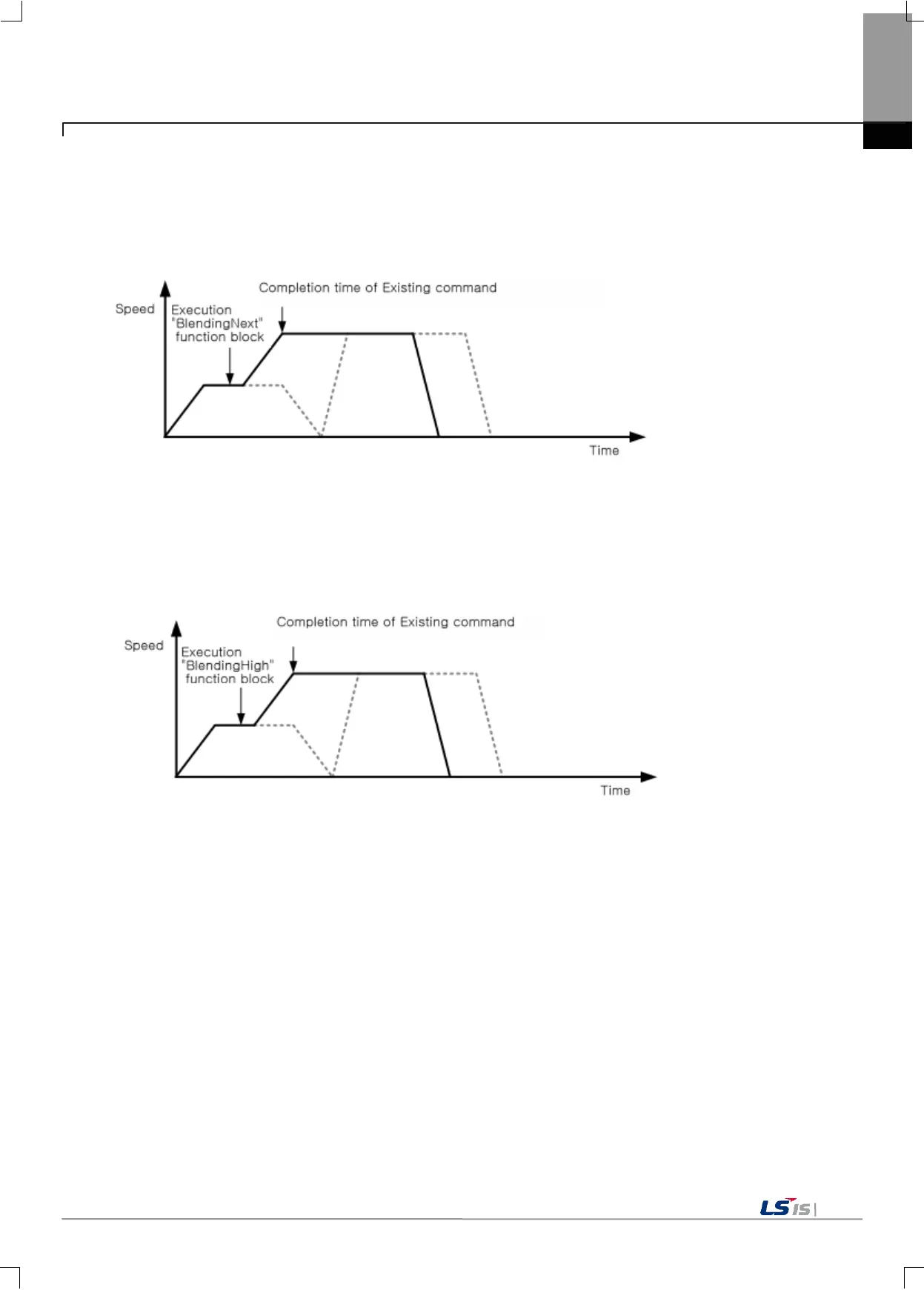
5. Buffer Mode “BlendingNext”
It executes the next command after acceleration/deceleration so that operation can be performed at the target velocity of the
next command at the point of time when the existing commands in execution are completed.
6. Buffer Mode “BlendingHigh”
It combines operation so that operation can be made at higher velocity in a comparison between the target velocity of the
existing commands in execution at the time of command completion and that of buffered command.

 Loading...
Loading...
