7 - 33
7 Advanced Settings
High-function General-purpose Inverter RX2 Series User’s Manual
7-2 Selection of Motor Control Methods
7
7-2-13 V/f Control with Sensor (Reducing Torque Characteristics)
Precautions for Correct Use
• When the revolution of the motor is hindered by such causes as the braking or the motor lock
caused by foreign objects, such hindrance may cause over current, or the like. When no such
adjustment as ones mentioned above improves the state, checking the portion around the
motor may sometimes improves it.
• If an application of load results in a great amount of change in the inverter’s output frequency
monitor [dA-01], a function to automatically change the frequencies for the overload limiting
function, the momentary-stop non-stop function, the over voltage suppression function may
work depending upon the settings of the functions.
V/F control is used to adjust the numbers of motor rotation to the command velocity while saving energy
when a fan/pump with encoder is driven.
The feedback of the encoder signal from the motor allows highly accurate frequency control.
For the adjustment of V/f control (reducing torque characteristics), see 7-2-2 V/f Control (Reducing
Torque Characteristics) on page 7-6.
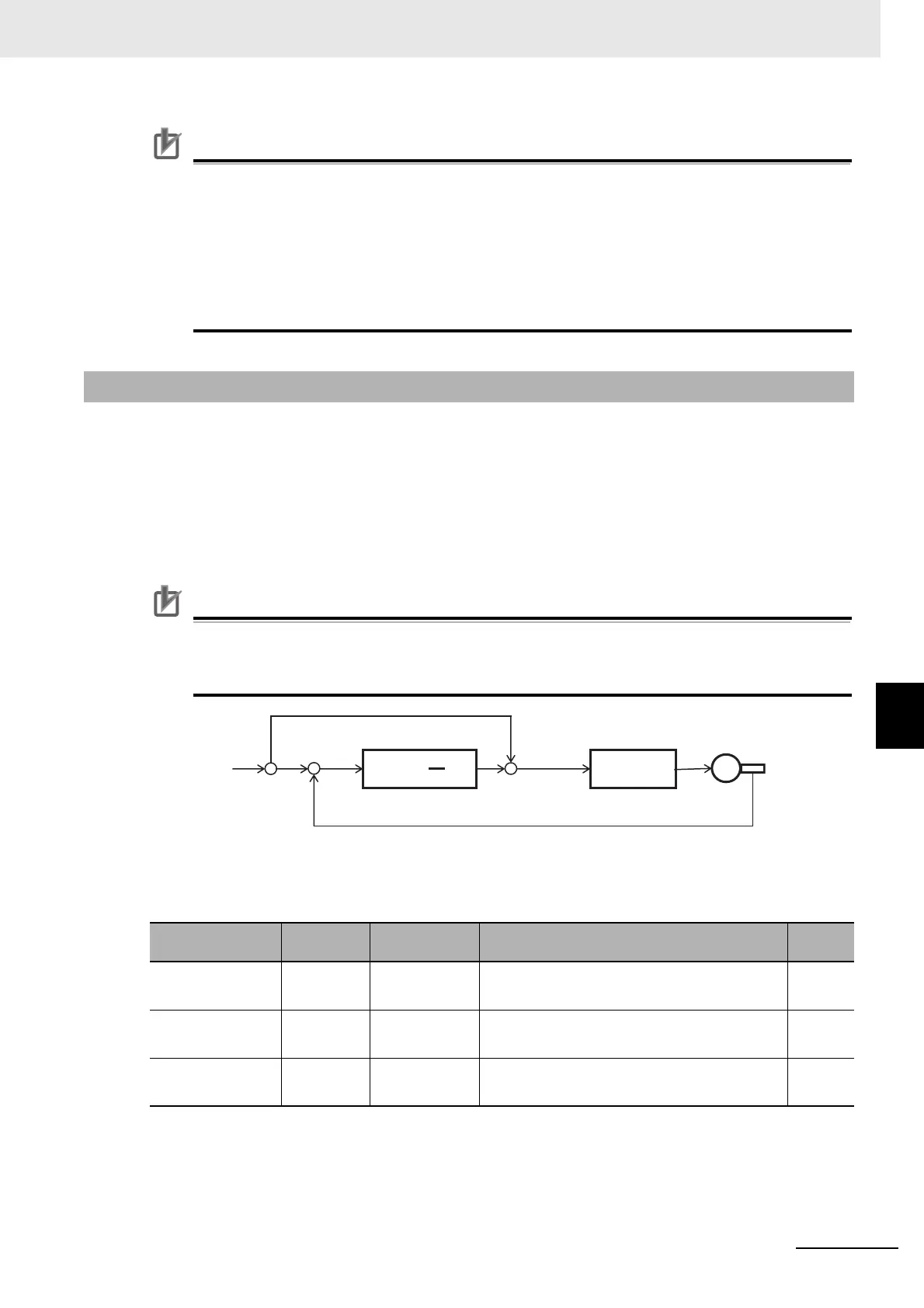
In the V/f control with feedback (FB), a correction of PI control is conducted on the command frequency
for the fed-back frequency to control the motor.
Precautions for Correct Use
• When [CA-90] = 02, Input terminals [A] and [B] are switched to the terminals for feedback
control. When [CA-90] ≠ 02, terminals [EA] and [EB] of the PG option unit are enabled.
•See 7-2-16 Encoder Feedback Control on page 7-37.
Parameter
7-2-13 V/f Control with Sensor (Reducing Torque Characteristics)
Item Parameter Data Description
Default
data
Control mode
selection,
1st-motor
[AA121] 05
To use V/f control with sensor (reducing torque
characteristics).
00
Slip Compensa-
tion P-gain witn
encoder, 1st-motor
[Hb170] 0 to 1000(%)
This is the P gain for the slip compensation of
control with sensor.
100
Slip Compensa-
tion I-gain witn
encoder, 1st-motor
[Hb171] 0 to 1000(%)
This is the I gain for the slip compensation of
control with sensor.
100
()
∙
Kp: proportional gain setting; Ti: integral time; s: operator; ε: deviation
Ki: integral gain setting (Ki = Ti/Kp)
PI control
Control
frequency
Frequency-volt-
age control
Output
frequency
Feedback
Deviation ε