7 - 37
7 Advanced Settings
High-function General-purpose Inverter RX2 Series User’s Manual
7-2 Selection of Motor Control Methods
7
7-2-16 Encoder Feedback Control
Precautions for Correct Use
• When the revolution of the motor is hindered by such causes as the braking or the motor lock
caused by foreign objects, such hindrance may cause over current, or the like. When no such
adjustment as ones mentioned above improves the state, checking the portion around the
motor may sometimes improves it.
• If an application of load results in a great amount of change in the inverter’s output frequency
monitor [dA-01], a function to automatically change the frequencies for the overload limiting
function, the momentary-stop non-stop function, the over voltage suppression function may
work depending upon the settings of the functions.
In 3G3RX2 series, input of feedback from a motor into a control circuit terminal block of the main body
or into a PG option unit allows the control with sensor and the absolute position control.
Precautions for Correct Use
• When [CA-90] ≠ 00, Input terminals [A] and [B] of the main body are switched to the terminals
for feedback control.
• When [CA-90] = 02, the control with sensor and the absolute position control are possible
with Input terminals [A] and [B].
• When [CA-90] ≠ 02, the control with sensor and the absolute position control are possible
with terminals [EAP], [EBP], [EAN], and [EBN] of the PG option unit.
• To conduct the pulse train position control, terminals [SAP], [SBP], [SAN], and [SBN] of the
PG option unit are used.
• When the PG option unit was once set in a slot and was removed later, a trip occurs with a
feedback option connection error [E112].
• Trips are triggered by an encoder disconnection error [E100] by setting switches on the PG
option unit. For more details, see 2-3-6 Wiring for PG Option Unit on page 2-63.
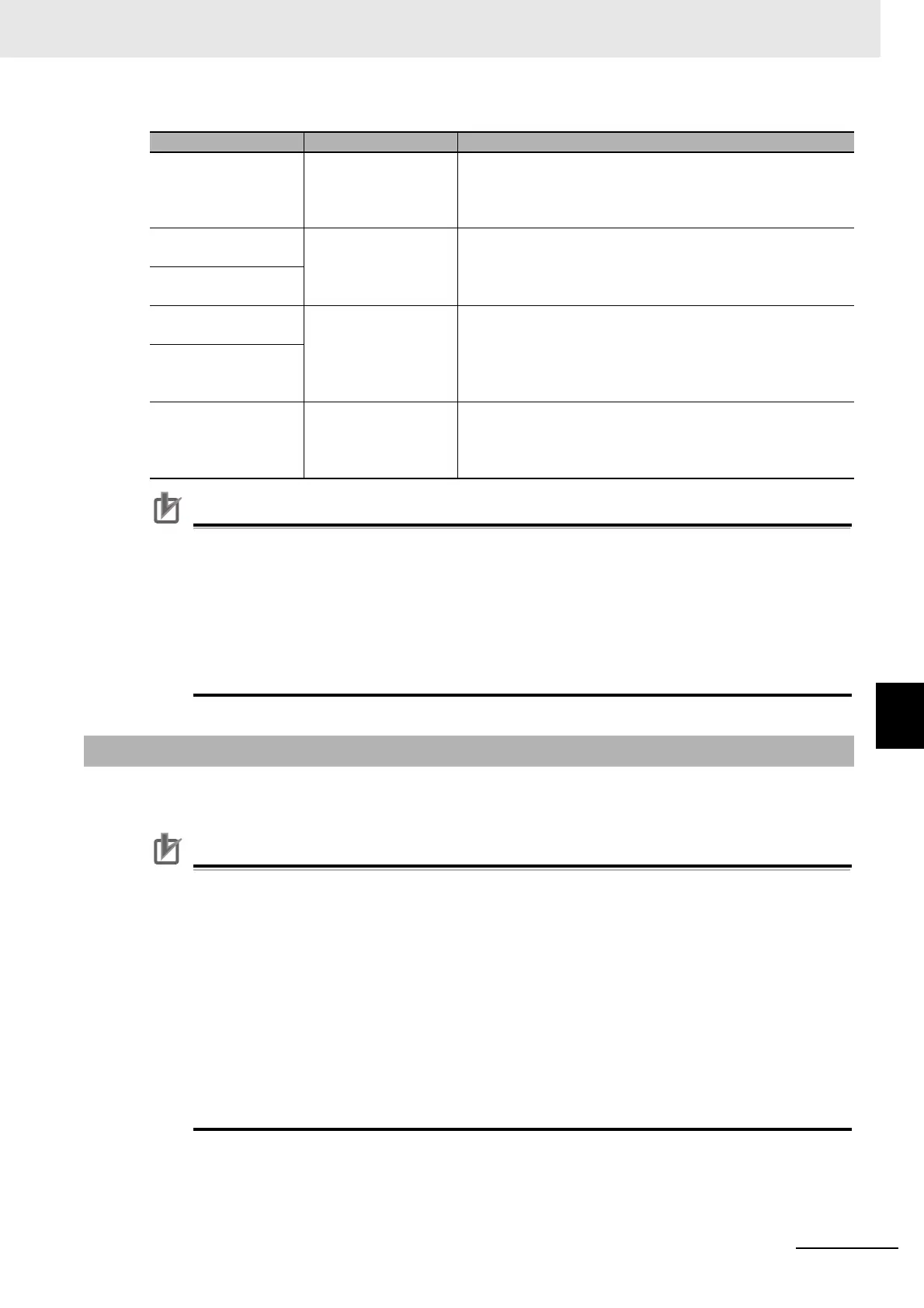
Phenomenon Estimated cause(s) Estimated cause(s)Exemplar measures to be taken
The motor speed fol-
lows the command
slowly.
Response of the out-
put is slow and the
change in the fed-back
value is slow.
Increment the proportional (P) gain [Hb170].
The motor operates
unstably.
Response to the
fed-back value is too
quick.
Decrement the proportional (P) gain [Hb170].
Overshoot and/or
hunting occur.
The motor speed oscil-
lates gently.
Response to the inte-
gral operation is slow.
Increment the integral (I) gain [Hb171].
Stabilization of the
operation requires a
long time.
It takes time for the
command value and
the motor speed to be
equal to each other.
Response of the out-
put is slow and the
change in the fed-back
value is slow.
Decrement the integral (I) gain [Hb171].
7-2-16 Encoder Feedback Control