7 Advanced Settings
7 - 36
High-function General-purpose Inverter RX2 Series User’s Manual
Automatic torque boost control is used when a motor with an encoder is driven; that require a certain
torque at the start; and when the motor revolution speed needs to be equal to the command speed.
The feedback of the encoder signal from the motor allows highly accurate frequency control.
As for adjustment of the automatic torque boost control, refer to 7-2-6 Automatic Torque Boost on page
7-12.
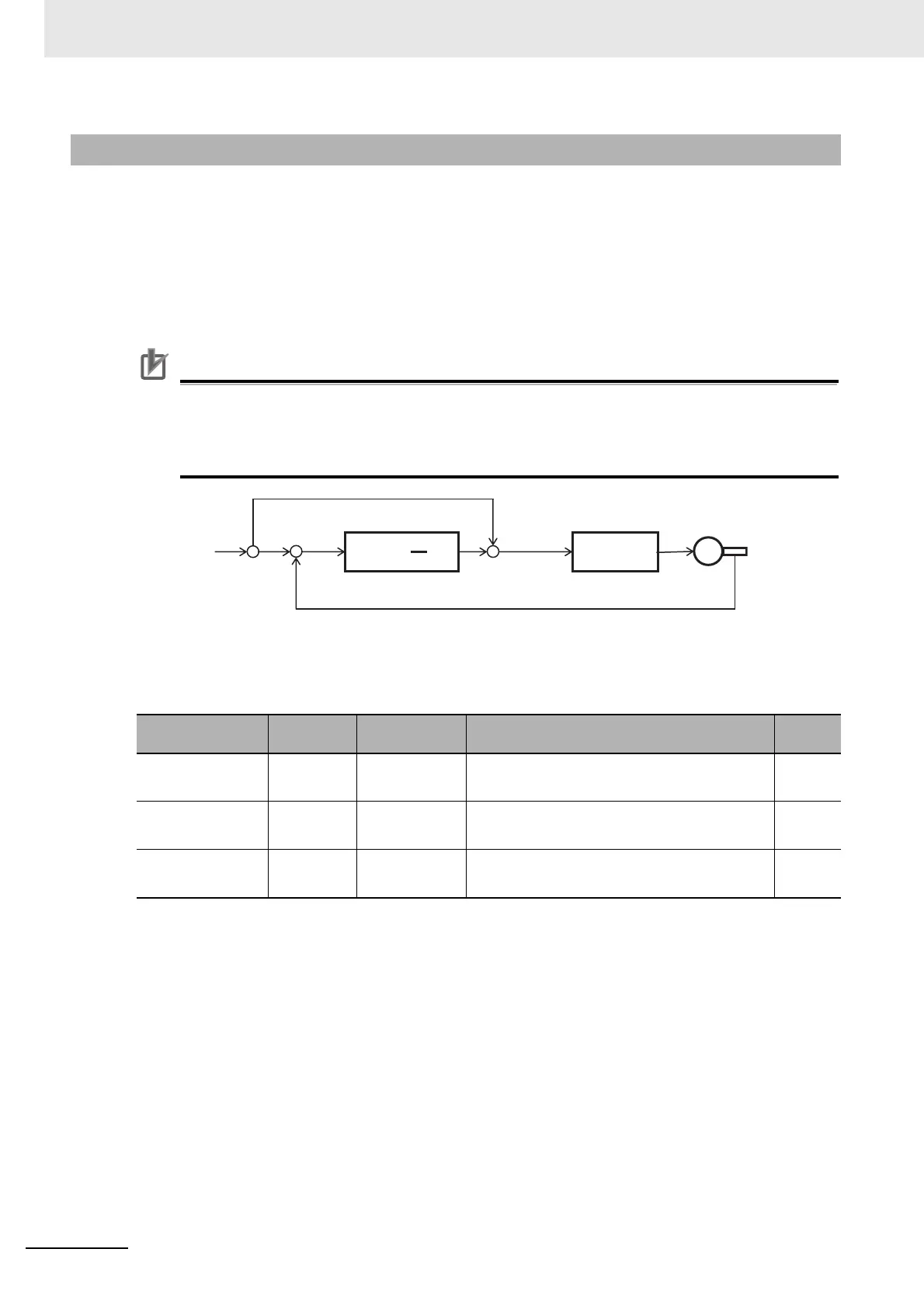
In the V/f control with feedback (FB), a correction of PI control is conducted on the command frequency
for the fed-back frequency to control the motor.
Precautions for Correct Use
• When [CA-90] = 02, Input terminals [A] and [B] are switched to the terminals for feedback
control. When [CA-90] ≠ 02, terminals [EA] and [EB] of the feedback option RX2-PG01 are
enabled.
•See 7-2-16 Encoder Feedback Control on page 7-37.
Parameter
7-2-15 Automatic Torque Boost Control with Sensor
Item Parameter Data Description
Default
data
Control mode
selection,
1st-motor
[AA121] 07 To use the automatic torque boost with sensor. 00
Slip Compensa-
tion P-gain witn
encoder, 1st-motor
[Hb170] 0 to 1000(%)
This is the P gain for the slip compensation of
control with sensor.
100
Slip Compensa-
tion I-gain witn
encoder, 1st-motor
[Hb171] 0 to 1000(%)
This is the I gain for the slip compensation of
control with sensor.
100
Kp: proportional gain setting; Ti: integral time; s: operator; ε: deviation
Ki: integral gain setting (Ki = Ti/Kp)
PI control
Control
frequency
Frequency-volt-
age control
Output
frequency
Feedback
Deviation ε

 Loading...
Loading...










