8 Applied Settings
8 - 108
High-function General-purpose Inverter RX2 Series User’s Manual
Adjusting the control gain at the positioning operation
Parameter
Precautions for Correct Use
• Set [AE-66] and [AE-67] to the ratios against the [Hb105] maximum frequency.
• Once the positioning operation is entered, the control starts at the speed set to the [AE-67]
APR start speed.
• During the positioning operation, the speed is limited to that set to the [AE-66] APR control
speed limit. During the positioning, the acceleration/deceleration time is 0 and the output fol-
lows the internal position control results.
• For the positioning operation, specify the stop behavior with the following functions
• Absolute value control
• Zero return
• Orientation
• SON terminal operation (at position servo)
• DC braking (at position servo lock control)
For the absolute position control, there is a move to a target position according to
(1) position command,
(2) speed command (frequency command),
(3) acceleration time, deceleration time, and then the position servo lock status is entered. (The servo
lock status is kept until the operation command is turned off.)
For the frequency command and acceleration/deceleration command at the absolute position control,
those selected at that time are followed.
When the position command is small, there may be the deceleration and then positioning without
reaching the speed command value.
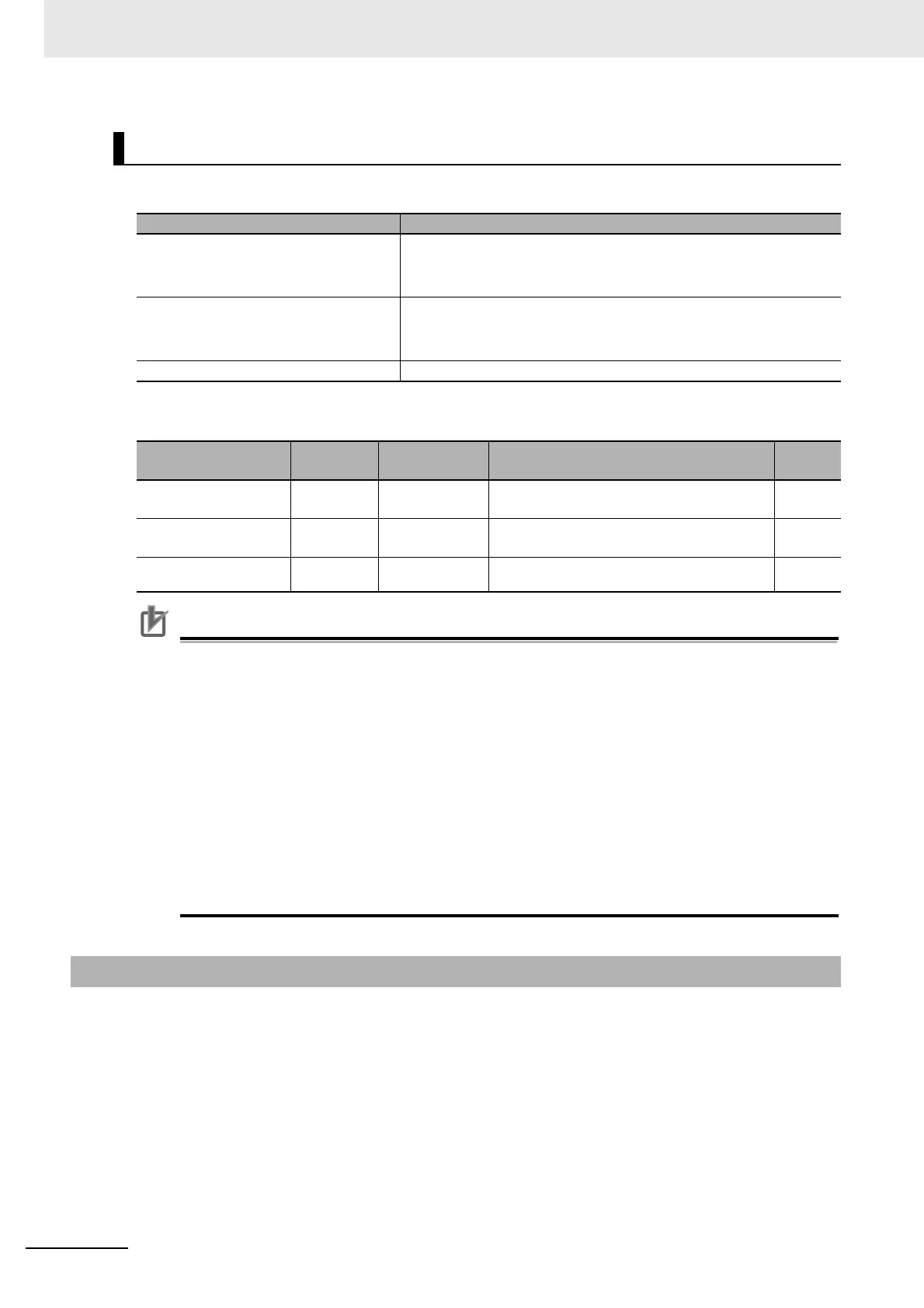
Adjustment of Gain at the Positioning Control
Occurrence Workaround Examples
The follow-up for the positioning stop is
bad.
• Adjust by increasing [AE-07] by 5%.
or
• Adjust by increasing [AE-67] and [AE-66] by 1%.
An abrupt behavior occurs at the posi-
tioning stop.
• Adjust by decreasing [AE-07] by 5%.
or
• Adjust by decreasing [AE-67] and [AE-66] by 1%.
An axis vibrates during the stop Adjust by decreasing [AE-07] by 5%.
Item
Function
Code
Data/
Data Range
Description
Default
data
Position loop gain set-
ting
[AE-07] 0.00 to 100.00 Adjust the position loop gain. 0.50
Speed Limit in APR
control
[AE-66]
0.00 to
100.00(%)
Limit the output at the positioning. 1.00
APR start speed [AE-67]
0.00 to
100.00(%)
Set the speed at the positioning start. 0.20
8-4-9 Absolute Position Control