7 Advanced Settings
7 - 32
High-function General-purpose Inverter RX2 Series User’s Manual
A motor with an encoder can be used with general-purpose characteristics of V/f control.
The feedback of the encoder signal from the motor allows highly accurate frequency control.
For the adjustment of V/f control (constant torque characteristics), see 7-2-1 V/f Control (Constant
Torque Characteristics) on page 7-5.
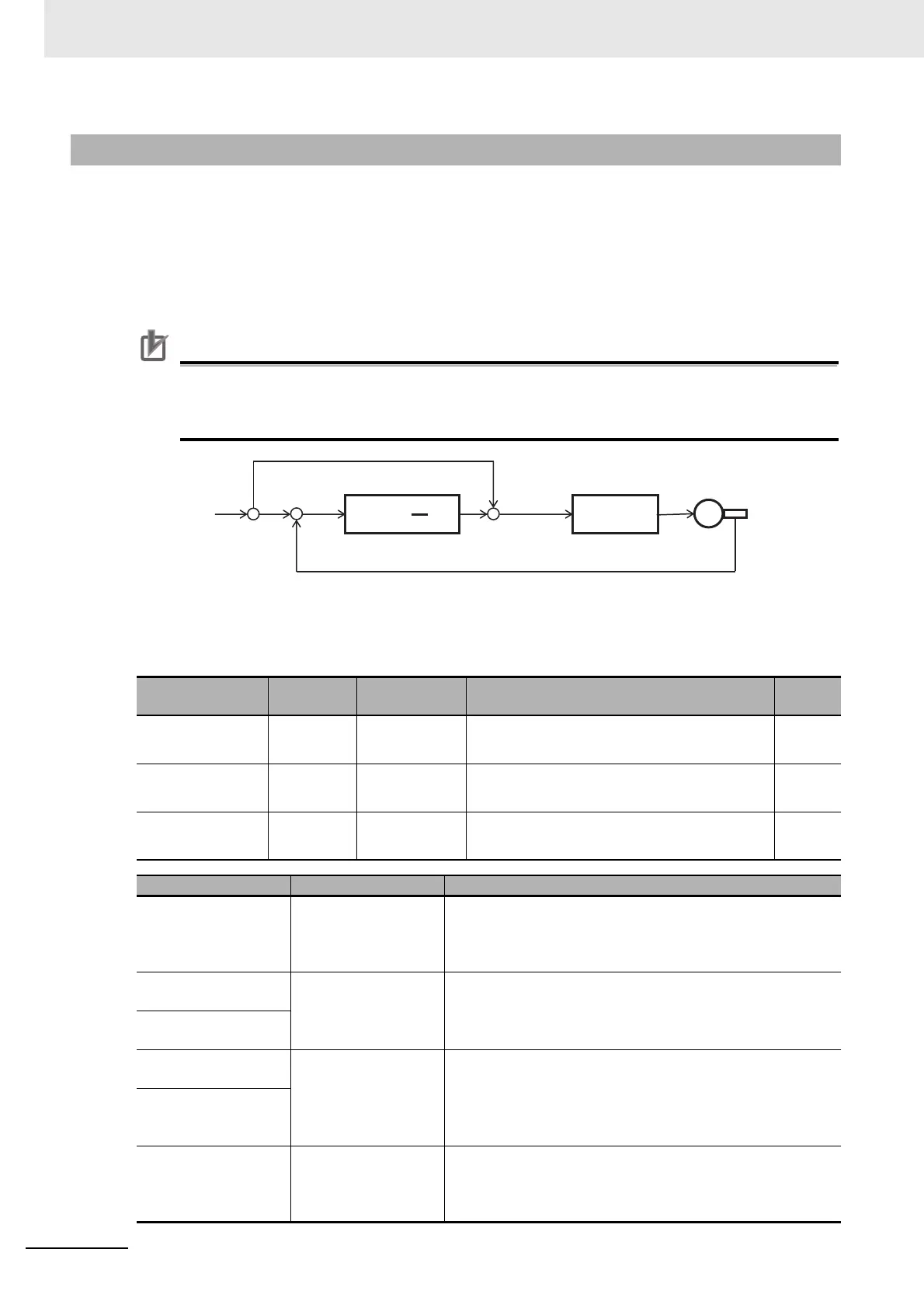
In the V/f control with feedback (FB), a correction of PI control is conducted on the command frequency
for the fed-back frequency to control the motor.
Precautions for Correct Use
• When [CA-90] = 02, Input terminals [A] and [B] are switched to the terminals for feedback
control. When [CA-90] ≠ 02, terminals [EA] and [EB] of the PG option unit are enabled.
•See 7-2-16 Encoder Feedback Control on page 7-37.
Parameter
7-2-12 V/f Control with Sensor (Constant Torque Characteristics)
Item Parameter Data Description
Default
data
Control mode
selection,
1st-motor
[AA121] 04
To use V/f control with sensor (constant torque
characteristics).
00
Slip Compensa-
tion P-gain witn
encoder, 1st-motor
[Hb170] 0 to 1000(%)
This is the P gain for the slip compensation of
control with sensor.
100
Slip Compensa-
tion I-gain witn
encoder, 1st-motor
[Hb171] 0 to 1000(%)
This is the I gain for the slip compensation of
control with sensor.
100
Phenomenon Estimated cause(s) Exemplar measures to be taken
The motor speed fol-
lows the command
slowly.
Response of the out-
put is slow and the
change in the fed-back
value is slow.
Increment the proportional (P) gain [Hb170].
The motor operates
unstably.
Response to the
fed-back value is too
quick.
Decrement the proportional (P) gain [Hb170].
Overshoot and/or
hunting occur.
The motor speed oscil-
lates gently.
Response to the inte-
gral operation is slow.
Increment the integral (I) gain [Hb171].
Stabilization of the
operation requires a
long time.
It takes time for the
command value and
the motor speed to be
equal to each other.
Response of the out-
put is slow and the
change in the fed-back
value is slow.
Decrement the integral (I) gain [Hb171].
Kp: proportional gain setting; Ti: integral time; s: operator; ε: deviation
Ki: integral gain setting (Ki = Ti/Kp)
PI control
Control
frequency
Frequency-volt-
age control
Output
frequency
Feedback
Deviation ε