7 - 31
7 Advanced Settings
High-function General-purpose Inverter RX2 Series User’s Manual
7-2 Selection of Motor Control Methods
7
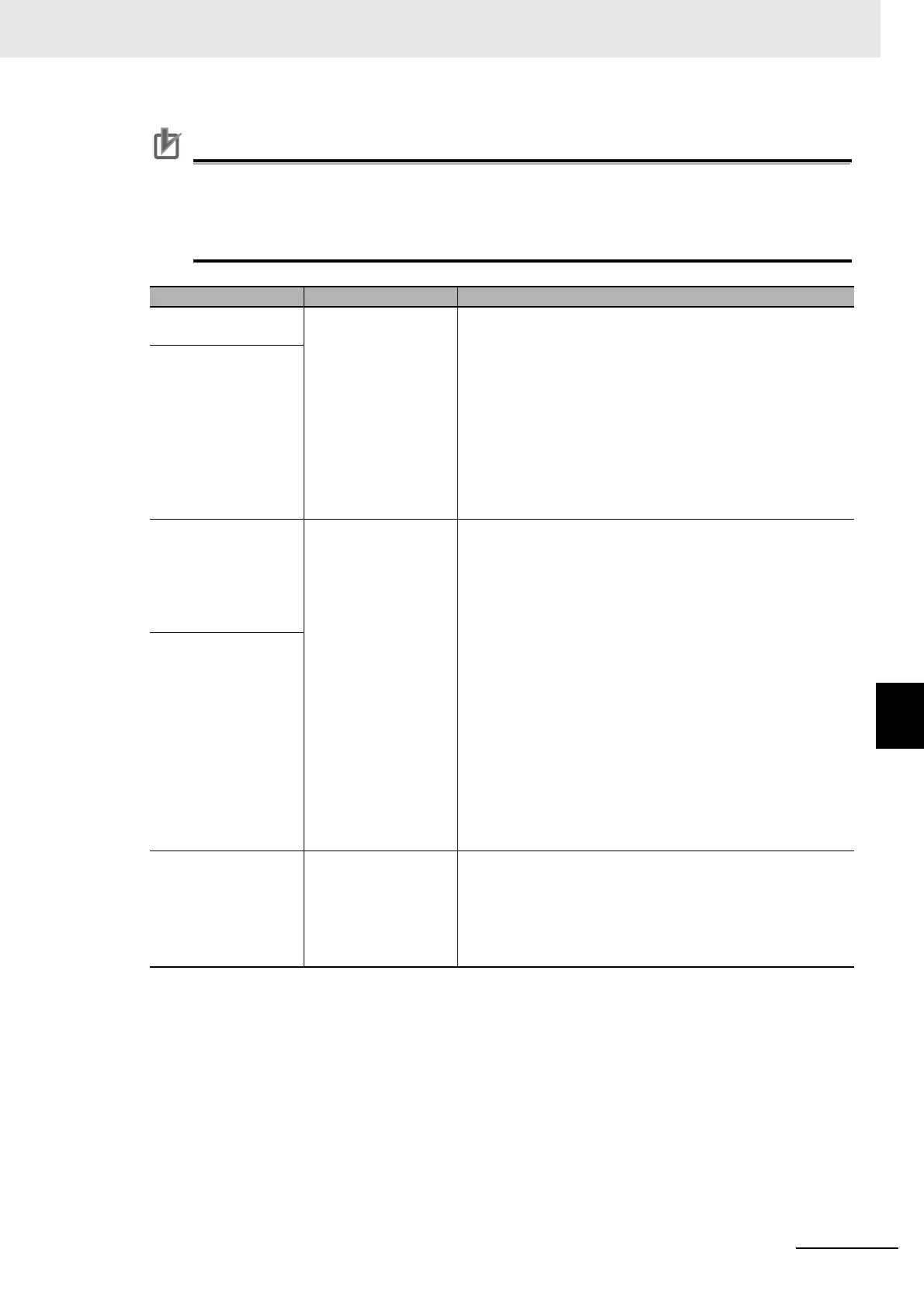
7-2-11 Synchronous Motor (Permanent Magnet Motor) Control
Precautions for Correct Use
During the operation, do not change the following set parameters. The operation may go into
destabilization.
• Open phase voltage detection gain [Hd-43]
• Minimum pulse width adjustment, SM(PMM)-IVMS [Hd-50]
Phenomenon Estimated cause(s) Exemplar measures to be taken
Over current occurs at
the start
• Insufficient starting
torque
• Misalignment of the
output phases and
the motor’s mag-
netic-pole positions
• Enable the selection of open-phase switch threshold correc-
tion [Hd-44].
• Adjust each of the speed control P gain [Hd-45] and the
speed control I gain [Hd-46] by 10 each time.
The adjustment should be conducted so that [Hd-45] ≤
[Hd-46].
Some motor characteristics require an adjustment by raising
and lowering the settings.
• Adjust the waiting time for open-phase switching [Hd-47] by
incrementing it by 5 each time. Some motor characteristics
require an adjustment by raising and lowering the settings.
At the start, the motor
loses synchronization
and no acceleration is
observed.
Loss of synchroniza-
tion, hunting, and/or
over current occur at
low speeds (at the low-
est frequency(switch)
or even lower).
• Insufficient torque
• Misalignment of the
output phases and
the motor’s mag-
netic-pole positions
• Enable the selection of open-phase switch threshold correc-
tion [Hd-44].
• Adjust each of the speed control P gain [Hd-45] and the
speed control I gain [Hd-46] by 10 each time.
The adjustment should be conducted so that [Hd-45] ≤
[Hd-46].
Some motor characteristics require an adjustment by raising
and lowering the settings.
• Adjust the waiting time for open-phase switching [Hd-47] by
incrementing it by 5 each time. Some motor characteristics
require an adjustment by raising and lowering the settings.
• Adjust by decrementing the current limit of IVMS threshold
[Hd-51] by 5 each time. Some motor characteristics may
provide instability with excessively small settings.
• Adjust by decrementing the IVMS threshold gain [Hd-52] by
5 each time. Some motor characteristics require an adjust-
ment by raising and lowering the settings.
Loss of synchroniza-
tion, hunting, and/or
over current occur at
low speeds (at the low-
est frequency(switch)
or even lower) and
with a heavy load.
The drive becomes
unstable at low speeds
(at the lowest fre-
quency(switch) or
even lower)
Misalignment of the
output phases and the
motor’s magnetic-pole
positions
• Adjust by decrementing the IVMS detection current filter
gain [Hd-42] by 5 each time. Some motor characteristics
require an adjustment by raising and lowering the settings.
• Adjust the waiting time for open-phase switching [Hd-47] by
incrementing it by 5 each time. Some motor characteristics
require an adjustment by raising and lowering the settings.