Writing data
5HTXHVW
PDVWHUVODYH
$QVZHU
VODYHPDVWHU
0DQXIDFWXUHUVSHFLILFZULWHUHTXHVW
,QGH[
:ULWHOHQJWK
0DQXIDFWXUHUVSHFLILFZULWHUHTXHVW2.
3,9VKDUH
KH[)KH[KH[
KH[
3.(,1'3:(3:(
In the event of a fault, the converter sends the following telegram as response to the master:
Further information
For more information about the PIV format structure and the value for PWE in the USS parameter
channel, see Section 5.3.4 "USS parameter channel" in the Fieldbus Function Manual.
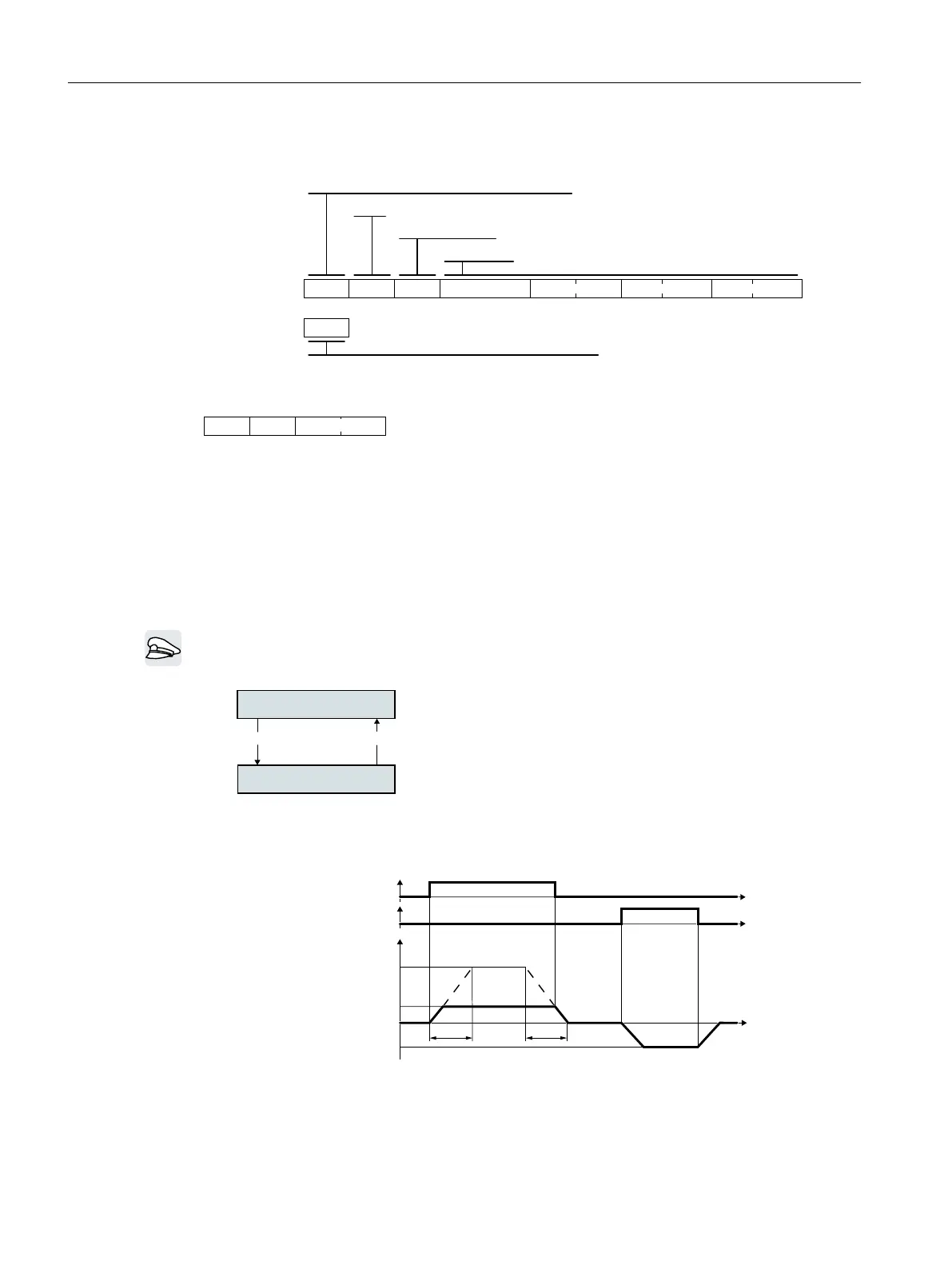
7.8 Jogging
The "JOG" function is typically used to temporarily move a machine part using local control
commands, e.g. a transport conveyor belt.
5HDG\WRVZLWFKRQ
2SHUDWLRQ
QR-2*-2*
Commands "JOG1" or "JOG 2" switch the motor on and o.
The commands are only active when the converter is in the "Ready for switching on" state.
W
W
W
0RWRUVSHHG
0D[LPXPVSHHG
-2*
6HWSRLQW-2*
6HWSRLQW-2*
-2*
S
S
S
SS
After switching on, the motor accelerates to the setpoint JOG 1 or setpoint JOG2. The two
dierent setpoints can, for example, be assigned to motor clockwise and counter-clockwise
rotation.
Advanced commissioning
7.8Jogging
SINAMICS G115D Wall Mounted distributed drive
184 Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA

 Loading...
Loading...








