Parameter Description Setting
p5314[0...n] Moment of inertia precontrol line‐
ar negative [1/s
2
]
Sets the linear coe‐
cients for moment of in‐
ertia precontrol in the
negative direction when
the moment of inertia
estimator is active.
Factory setting: 0
In a negative direction
of rotation: Moment of
inertia = p5314 × load
torque + p5315
p5315[0...n] Moment of inertia precontrol con‐
stant negative [kgm
2
]
Sets the constant coe‐
cients for moment of in‐
ertia precontrol in the
negative direction when
the moment of inertia
estimator is active.
Factory setting: 0
7.20.3.7 Pole position identication
Overview
The converter must know the pole position of the rotor in the motor in order to be able to control
the torque and speed of a synchronous motor.
For encoderless motors, the converter determines the pole position of the motor via a
measurement.
Precondition
The motor remains at a standstill.
Function description
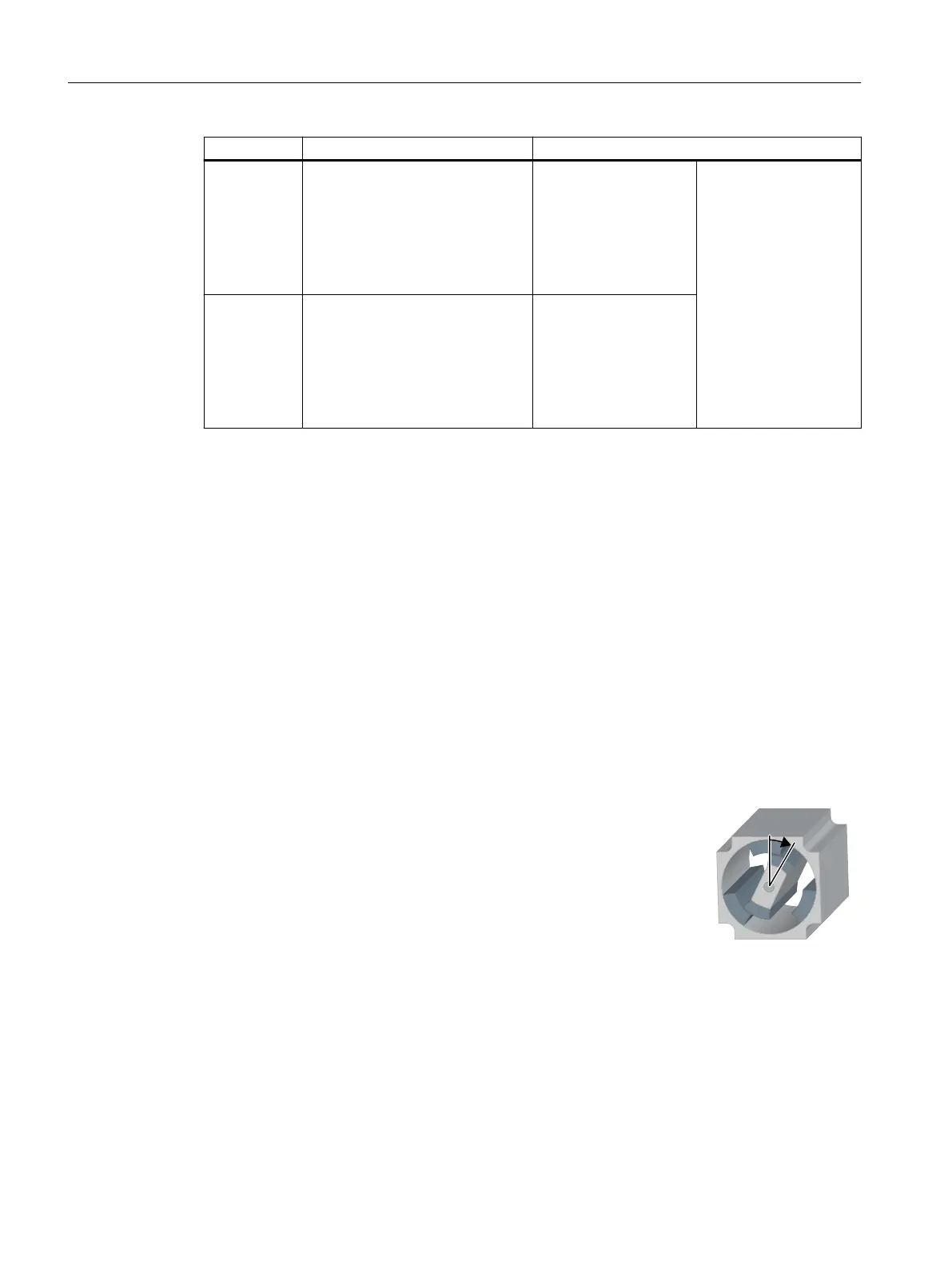
The pole position of a synchronous motor is the deviation between the
magnetic axis in the rotor and the magnetic axis in the stator.
The image below shows you the pole position of a synchronous motor in
a simplied cross-section.
For permanent magnet synchronous motors, the following methods are possible for pole
position identication:
• p1980 = 1: The most reliable and fastest, but also the loudest method
During quick commissioning the converter sets p1980 = 1.
• p1980 = 4: Comparatively quiet method in two steps
• p1980 = 10: Comparatively slow method. This method is only possible if the motor can rotate
freely during pole position identication.
Advanced commissioning
7.20Motor control
SINAMICS G115D Wall Mounted distributed drive
306 Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA

 Loading...
Loading...








