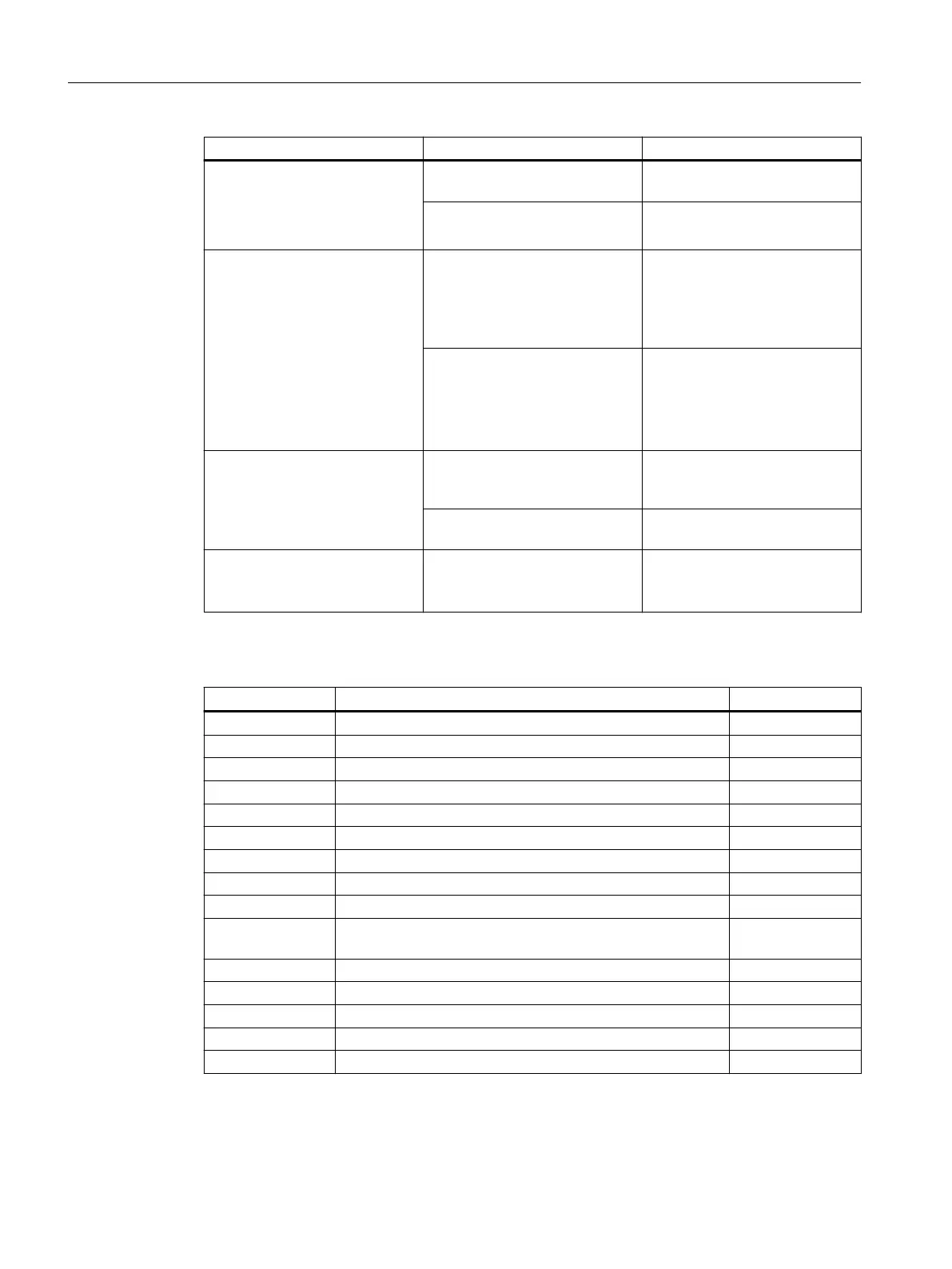
Problem Possible cause Solution
The converter signals one of the
following faults:
• F07967
• F07969
The motor has signicant pole sa‐
liency.
Change the PolID technique:
p1980 = 4 or p1980 =10.
The current is too high during
pole position identication.
Decrease the value of p329 incre‐
mentally by 10%.
The motor stalls or starts with dif‐
culty.
The converter does not generate
enough starting torque
Increase the value of p1610
or/and p1611 incrementally by
10%.
Let the motor cool down before
each start attempt.
Motor is oversaturated. Decrease p1610 and p1611 in‐
crementally by 10%.
Increase ramp-up time p1120.
Increase initial rounding time
p1130.
The motor speed tends to oscil‐
late.
The transition from open loop to
closed loop phase during acceler‐
ation is not stable.
Increase p1755 incrementally by
approx. 10% until the motor ac‐
celerates smoothly and stably.
The speed controller gain is too
high.
Optimize the speed controller.
Motor overspeed The speed overshoots after the
motor accelerates.
Increase ramp-up time p1120 or
nal rounding time p1131.
Optimize the speed controller.
Parameters
Number Name Factory setting
p0304[M] Rated motor voltage 0 V
p0305[M] Rated motor current 0A
p0307[M] Rated motor power 0kW
p0310[M] Rated motor frequency 0Hz
p0311[M] Rated motor speed 0rpm
p0314[M] Motor pole pair number 0
p0316[M] Motor torque constant 0Nm/A
p0329[M] Motor pole position identication current 0A
p1080[D] Minimum speed 0rpm
p1120[C] Ramp-function generator ramp-up time Dependent on rat‐
ed power
p1131[C] Ramp-function generator nal rounding time 0s
p1610[D] Torque setpoint static (sensorless) 50%
p1611[D] Additional acceleration torque (sensorless) 30%
p1755[D] Motor model changeover speed sensorless operation 210000rpm
p1980 PolID technique 4
Advanced commissioning
7.20Motor control
SINAMICS G115D Wall Mounted distributed drive
296 Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA

 Loading...
Loading...








