0RPHQWRILQHUWLD
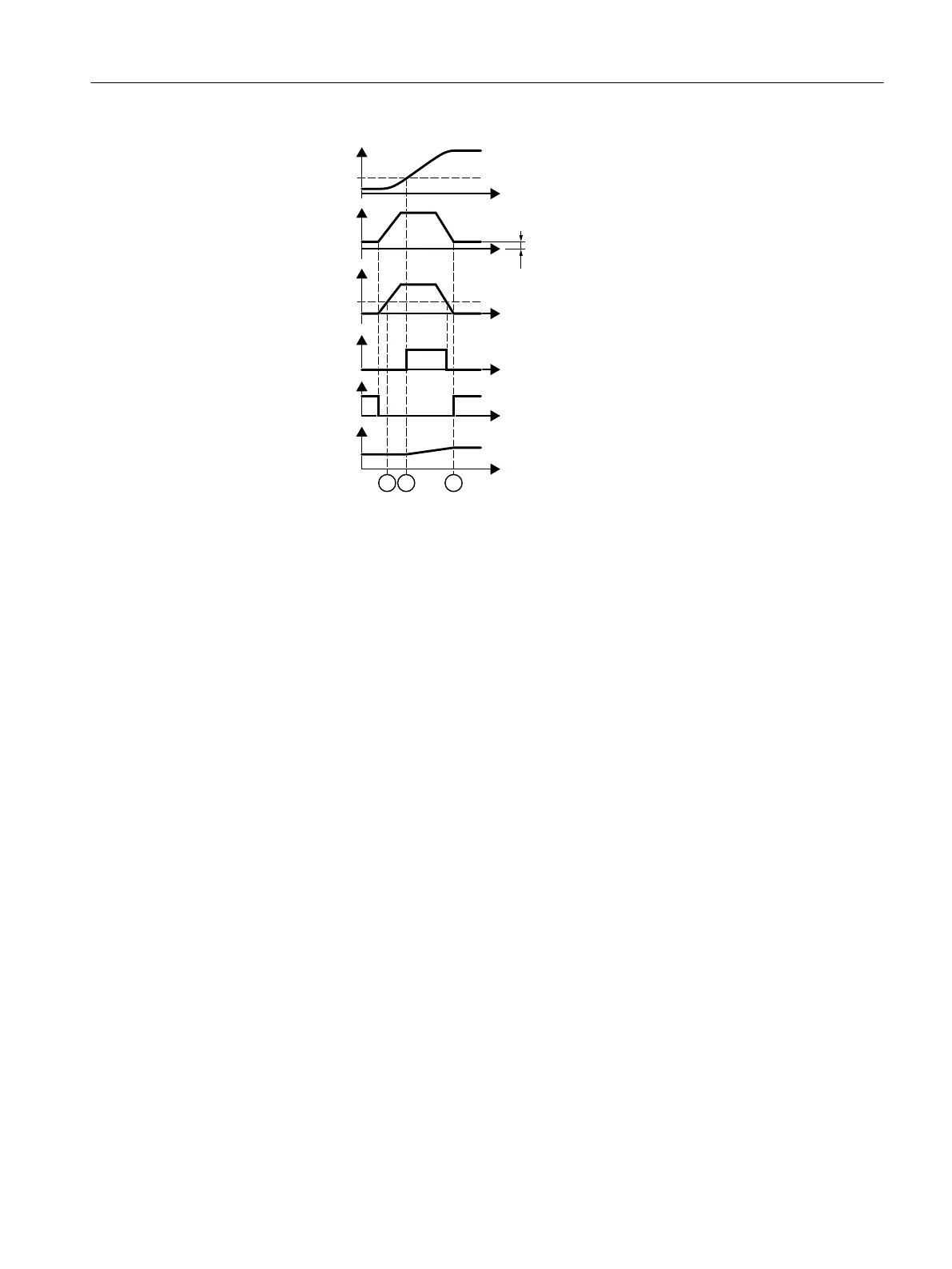
HVWLPDWLRQLVDFWLYH
0RWRUWRUTXH00
0LQLPXPWRUTXH
$FFHOHUDWLQJWRUTXH
0%
6SHHG
/RDGHVWLPDWRULV
DFWLYH
&DOFXODWHGPRPHQWRI
LQHUWLD
U
S
W
W
W
W
W
W
0
/
For higher speed changes, the converter initially calculates the accelerating torque M
B
as
dierence between the motor torque M
M
, load torqueM
L
and frictional torque M
R
:
M
B
= M
M
- M
L
- M
R
Moment of inertia J of the motor and load is obtained from the accelerating torque M
B
and
angular acceleration α (α=rate at which the speed changes):
J=M
B
/α
If all of the following conditions are met, the converter calculates the moment of inertia:
• ① The rated accelerating torque M
B
must satisfy the following two conditions:
– The sign of M
B
is the same as the direction of the actual acceleration
– M
B
> p1560× rated motor torque (r0333)
• ② speed > p1755
• The converter has calculated the load torque in at least one direction of rotation.
• Acceleration setpoint > 81/s
2
(≙ speed change 480rpm per s)
③ The converter calculates the load torque again after acceleration.
Moment of inertia precontrol
In applications where the motor predominantly operates with a constant speed, the
converter can only infrequently calculate the moment of inertia using the function described
above. Moment of inertia precontrol is available for situations such as these. The moment
of inertia precontrol assumes that there is an approximately linear relationship between the
moment of inertia and the load torque.
Example: For a horizontal conveyor, in a rst approximation, the moment of inertia depends
on the load.
Advanced commissioning
7.20Motor control
SINAMICS G115D Wall Mounted distributed drive
Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA 301

 Loading...
Loading...








